

2 Кинематический анализ рычажного механизма
2.1 Исходные данные
2.1.1 Кинематическая схема механизма
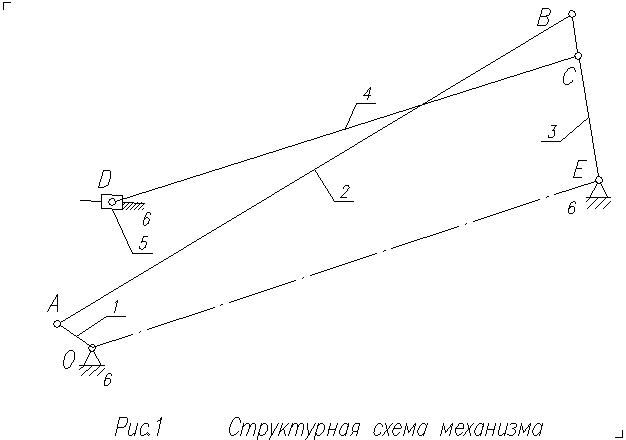
Размеры звеньев: lOA = 0,12 м; lAB = 1,72 м; lBE = 0,48 м; lCD = 0,86 м; lEC =0,36 м.
Рисунок 2.1 – Кинематическая схема
2.1.2 Величина угловой скорости кривошипа ωК = 13,2 рад/с.
2.1.3 Направление вращения кривошипа – против часовой стрелки.
2.1.4 Угол поворота кривошипа в расчетном положении φп = 115° от положения, соответствующего началу рабочего хода в сторону вращения.
2.1.5 Закон изменения силы полезного сопротивления:
,
где ![]() =
1,8 –
максимальное значение силы Fпс.
=
1,8 –
максимальное значение силы Fпс.
h – ход выходного звена.
S – перемещение выходного звена в расчетном положении.
2.2 ПОСТРОЕНИЯ ПЛАНА МЕХАНИЗМА В РАСЧЕТНОМ ПОЛОЖЕНИИ
2.2.1 Приняв масштабный коэффициент плана μl = 0,005 м/мм, вычисляем длины отрезков на плане, соответствующих звеньям механизма:
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
2.2.2 Изображаем элементы стойки: шарниры О и Е, а также направляющую MD под углом β = 20°.
2.2.3 Вычерчиваем кривошип OA под углом φp = 115° к межосевой линии OE.
2.2.4 Из точки E проводим дугу окружности радиуса = 96 мм (траектория точки B).
2.2.5
С помощью программы AutoCAD
на прямой
![]() = 344 мм делаем
засечку на траектории точки B
и находим эту точку.
= 344 мм делаем
засечку на траектории точки B
и находим эту точку.
2.2.6 Проводим прямые и .
2.2.7 Строим стержень = 72 мм.
2.2.8
С помощью программы AutoCAD
на прямой
![]() = 366 мм делаем
засечку на направляющей стойки и находим
центр шарнира D.
= 366 мм делаем
засечку на направляющей стойки и находим
центр шарнира D.
2.2.9 Соединяем точки C и D прямой линией, изображаем ползун.
2.2.10 Проставляем обозначения кинематических пар, номера звеньев, углы поворота кривошипа φр и коромысла γ, а также направления вращения кривошипа.
2.2.11 Определяем длину хода выходного звена в расчетном положении:
![]() м.
м.
2.3 Определение линейных и угловых скоростей
2.3.1 Вычисляем скорость центра шарнира A:
![]() м/с.
м/с.
2.3.2 Рассматривая плоское движение звена 2, составляем векторное уравнение скорости центра шарнира B и анализируем входящие в него величины:
![]() .
.
2.3.3
Исходя из ориентировочной длины вектора
VA
![]() = 160 мм, находим
приближенное значение масштабного
коэффициента плана скоростей:
= 160 мм, находим
приближенное значение масштабного
коэффициента плана скоростей:
![]() м/(с·мм).
м/(с·мм).
2.3.4 Принимаем стандартное значение μV = 0,01 м/(с·мм).
2.3.5 Решаем векторное уравнение графически. Длина вектора, известного полностью:
![]() мм.
мм.
Искомые линейные скорости:
![]() м/с;
м/с;
![]() м/с.
м/с.
2.3.6 Используя теорему о подобии, строим на плане точку с.
![]() ,
,
откуда
![]() мм,
мм,
2.3.7 Составляем, анализируем и решаем векторное уравнение для скорости точки D:
![]() .
.
Искомые линейные скорости:
![]() м/с;
м/с;
![]() м/с.
м/с.
2.3.8 Угловые скорости звеньев:
![]() рад/с;
рад/с;
![]() рад/с;
рад/с;
![]() рад/с.
рад/с.
2.3.9 Определяем направления угловых скоростей и проставляем их на плане механизма.
2.4 Определение линейных и угловых ускорений
2.4.1 Вычисляем ускорение точки А. Поскольку ω1 – const, оно является полностью нормальным:
![]() м/с2.
м/с2.
2.4.2 Рассматривая плоское движение звена 2 и вращательное звена 3, составляем систему векторных уравнений ускорения точки В и анализируем входящие в них величины:
![]()
 ,
,
![]() .
.
2.4.3 Вычисляем нормальные составляющие ускорений:
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
2.4.4 Аналогично п. п. 2.3.3 и 2.3.4 определяем масштабный коэффициент плана ускорений. Принимаем μa = 0,1 м/(с2·мм).
2.4.5 Решаем систему графически. Для этого из каждого уравнения сначала откладываем полностью известные векторы, а затем проводим известные направления до их пересечения в точке b. Длины векторов на плане:
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
Поскольку аЕ = 0, точка е совпадает с полюсом π.
2.4.6 Аналогично п. 2.3.6 строим на плане точку с.
;
![]() мм.
мм.
Определяем ускорение точек B и C:
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
2.4.7 Составляем, анализируем и решаем векторное уравнение ускорения точки D:
![]() ,
,
где ![]() м/с2.
м/с2.
Тогда ![]() мм.
мм.
Тангенциальные составляющие ускорений:
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
Ускорение точки D:
![]() м/с2.
м/с2.
Ускорение звена CD:
![]() м/с2.
м/с2.
2.4.8 Определяем угловые ускорения звеньев:
![]() рад/с2;
рад/с2;
![]() рад/с2;
рад/с2;
![]() рад/с2.
рад/с2.
Наносим их направления на план механизма.
2.4.9 Находим ускорения центров масс звеньев. Считаем, что они лежат на их серединах. Используем при этом теорему о подобии для каждого из звеньев:
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.