

ОГЛАВЛЕНИЕ
1 СТРУКТУРНЫЙ АНАЛИЗ И ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
РЫЧАЖНОГО МЕХАНИЗМА 4
1.1 Исходные данные 4
1.2 Структурный анализ рычажного механизма 5
1.3 Определение недостающих размеров звеньев 7
1.4 Определение направления вращения кривошипа 9
2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА 11
2.1 Исходные данные 11
2.2 Построение плана механизма в расчетном положении 12
2.3 Определение линейных и угловых скоростей 13
2.4 Определение линейных и угловых ускорений 15
3 СИЛОВОЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА 19
3.1 Исходные данные 19
3.2 Определение активных силовых факторов и инерционной нагрузки на звенья 19
3.3 Силовой расчет структурной группы 4 – 5 21
3.4 Силовой расчет структурной группы 2 – 3 23
3.5 Силовой расчет входного звена 24
4 СИНТЕЗ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗУБЧАТОГО МЕХАНИЗМА 25
4.1 Исходные данные 25
4.2 Определение неизвестного числа зубьев одного из колес 25
4.3 Кинематический анализ механизма аналитическим методом 26
4.4 Кинематический расчет механизма графическим методом 27
4.5 Сопоставление результатов 29
5 СИНТЕЗ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ 30
5.1 Исходные данные 30
5.2 Геометрический расчет 30
5.3 Вычисление качественных показателей зубчатого зацепления 35
6 СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА 36
6.1 Исходные данные 36
6.2 Построение графиков движения выходного звена 37
6.3 Определение радиуса основной шайбы 40
6.3.1 Метод наибольшей отрицательной ординаты 40
6.3.2 Метод Геронимуса 40
6.4 Построение теоретического профиля кулачка 40
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 42
1 Структурный анализ и геометрический синтез
РЫЧАЖНОГО МЕХАНИЗМА
1.1 Исходные данные
1.1.1 Структурная схема рычажного механизма, показанная на рисунке 1.
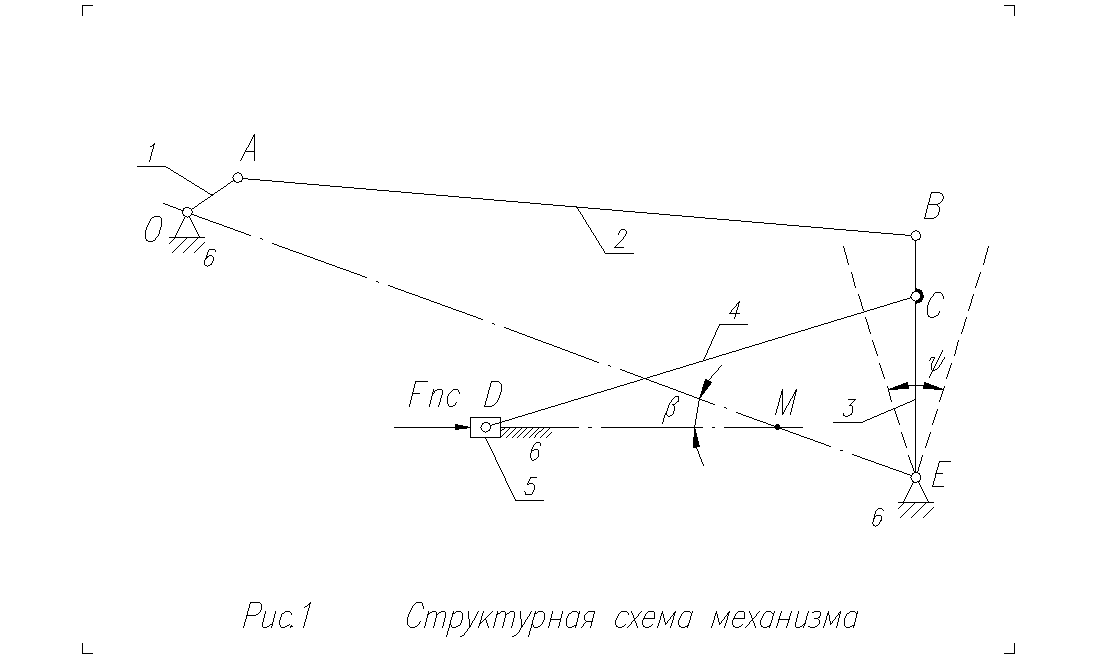
Рисунок 1.1 – Структурная схема механизма
1.1.2 Размеры коромысла: lВЕ = 0,48 м ; lЕС = 0,36 м.
1.1.3 Угол размаха коромысла: ψ = 35°.
1.1.4 Расположение направляющей стойки, по которой перемещается ползун: lЕМ/lОЕ = 0,22, < β.
1.1.5 Входное звено – кривошип.
1.1.6 Коэффициент изменения средней скорости выходного звена k = 1,06.
1.1.7 Максимальные узлы давления в кинематических парах: в паре B δвmax = 48°; в паре D δnmax = 15°.
1.1.8 Направление действия силы полезного сопротивления Fпс – по стрелке.
1.1.9 Закон изменения силы полезного сопротивления:
![]() ,
,
где S – перемещение выходного звена;
h – ход выходного звена.
1.2 Структурный анализ рычажного механизма
1.2.1 Вычерчиваем структурную схему механизма и указываем на ней номера и наименования звеньев. Звено 5 является выходным, так как к нему приложена сила полезного сопротивления Fпс.
1 – кривошип; 2 и 4 – шатуны; 3 – коромысло; 5 – ползун; 6 – стойка.
Рисунок 1.2 – Структурная схема механизма
1.2.2 Составляем таблицу кинематических пар
Таблица 1.1
№ КП |
Обозначение |
Звенья, входящие |
Класс |
Тип |
Относительные движения звеньев |
1 |
А |
1,6 |
5 |
Низшая |
Вращательное |
2 |
В |
1,2 |
5 |
Низшая |
Вращательное |
3 |
В |
2,3 |
5 |
Низшая |
Вращательное |
4 |
С |
3,4 |
5 |
Низшая |
Вращательное |
5 |
E |
3,6 |
5 |
Низшая |
Вращательное |
6 |
D |
4,5 |
5 |
Низшая |
Вращательное |
7 |
D' |
5,6 |
5 |
Низшая |
Поступательное |
1.2.3 Определяем число степеней подвижности механизма по формуле Чебышева:
![]() ,
(1.1)
,
(1.1)
где n = 5 – число подвижных звеньев (по рисунку 1.2);
p5 = 7 – количество пар 5 класса (по таблице 1.1);
p4 = 0 – количество пар 4 класса (по таблице 1.1);
qпс = 0 – число пассивных связей. В рассматриваемом механизме нельзя отбросить ни одного из звеньев так, чтобы это не сказалось на законе движения выходного звена.
Подставляем значения в формулу (1.1) и выполняем вычисление:
![]() .
.
В механизме одно выходное звено.
1.2.4 Расчленяем механизм на простейшие структурные составляющие
Механизм 1 класса |
Структурная группа 2 класса ВВВ |
Структурная группа 2 класса ВВП |
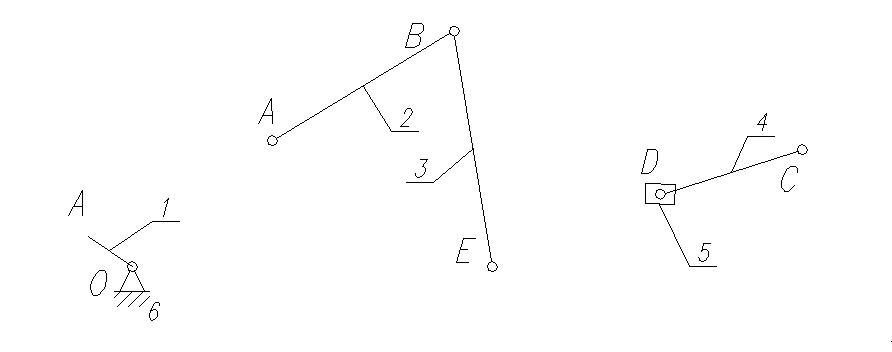
Рисунок 1.3 – Простейшие структурные составляющие механизма
1.2.5
Формула строения:![]() I
(1,6) → II
(2,3) → II
(4,5).
I
(1,6) → II
(2,3) → II
(4,5).
1.2.6 Механизм в целом относится ко второму классу.