

Основні дані броньових пластинчастих магнітопроводів
Тип магніто- провода |
Розміри , мм |
Пере-тин магні-топро-вода, см2 |
Дов-жина магніт-ної силової лінії, см |
Основ-ний параметр транс-форма-тора, см4 |
Орієнтована потужність |
|||||||||||||||||||||||||||||||||||||||||||
f, Гц |
||||||||||||||||||||||||||||||||||||||||||||||||
a |
h |
c |
C |
H |
b |
Sст |
lст |
SстS0 |
5 |
400 |
||||||||||||||||||||||||||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|||||||||||||||||||||||||||||||||||||
Ш 09Х09 |
9 |
22,5 |
9 |
36 |
31,5 |
9 |
0,81 |
7,72 |
1,62 |
2 |
15 |
|||||||||||||||||||||||||||||||||||||
Ш 09Х12 |
12 |
1,08 |
2,16 |
2,5 |
17 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 12Х10 |
12 |
30
|
12 |
48
|
42 |
10 |
1,08 |
10,03 |
4,3 |
5 |
30 |
|||||||||||||||||||||||||||||||||||||
Ш 12Х12 |
|
|
|
|
|
12 |
1,44 |
|
5,2 |
5,5 |
33 |
|||||||||||||||||||||||||||||||||||||
Ш 12Х16 |
16 |
1,92 |
6,8 |
7 |
44 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 12Х20 |
20 |
2,4 |
8,6 |
8,5 |
52 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 12Х25 |
25 |
3 |
10,8 |
10 |
60 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 16Х12 |
16 |
40 |
16 |
64 |
56 |
12 |
1,92 |
13,7 |
12,1 |
12 |
72 |
|||||||||||||||||||||||||||||||||||||
Ш 16Х16 |
|
|
|
|
|
16 |
2,56 |
|
16,6 |
15 |
92 |
|||||||||||||||||||||||||||||||||||||
Ш 16Х20 |
20 |
3,2 |
20,5 |
18 |
110 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 16Х25 |
25 |
4 |
25,6 |
22 |
130 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 16Х32 |
32 |
5,12 |
32,6 |
27 |
150 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 20Х20 |
20 |
50 |
20 |
80 |
70 |
20 |
4 |
17,4 |
40 |
32 |
185 |
|||||||||||||||||||||||||||||||||||||
Ш 20Х25 |
|
|
|
|
|
25 |
5 |
|
50 |
40 |
220 |
|||||||||||||||||||||||||||||||||||||
Ш 20Х32 |
32 |
6,4 |
64 |
48 |
260 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 20Х40 |
40 |
8 |
80 |
58 |
320 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 25Х16 |
25 |
62,5 |
25 |
100 |
87,5 |
16 |
4,8 |
21,4 |
62,5 |
50 |
280 |
|||||||||||||||||||||||||||||||||||||
Ш 25Х20 |
|
|
|
|
|
20 |
5 |
|
78 |
60 |
325 |
|||||||||||||||||||||||||||||||||||||
Ш 25Х25 |
25 |
6,25 |
97,5 |
72 |
385 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 25Х32 |
32 |
8 |
125 |
90 |
480 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 25Х40 |
40 |
10 |
156 |
100 |
525 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 25Х50 |
50 |
12,5 |
195 |
130 |
655 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 32Х20 |
32 |
80 |
32 |
128 |
112 |
20 |
6,4 |
27,4 |
164 |
110 |
600 |
|||||||||||||||||||||||||||||||||||||
Ш 32Х25 |
|
|
|
|
|
25 |
8 |
|
205 |
140 |
740 |
|||||||||||||||||||||||||||||||||||||
Ш 32Х32 |
32 |
10,2 |
260 |
170 |
900 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 32Х40 |
40 |
12,8 |
328 |
210 |
1000 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 32Х50 |
50 |
16 |
410 |
250 |
1160 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 32Х64 |
64 |
20,4 |
522 |
300 |
1400 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 40Х25 |
40 |
100 |
40 |
160 |
140 |
25 |
10 |
34,3 |
400 |
250 |
1250 |
|||||||||||||||||||||||||||||||||||||
Ш 40Х32 |
32 |
12,6 |
512 |
310 |
1550 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 40Х40 |
40 |
16 |
640 |
375 |
1750 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 40Х50 |
50 |
20 |
800 |
450 |
2050 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 40Х64 |
64 |
25,6 |
1025 |
550 |
2400 |
|||||||||||||||||||||||||||||||||||||||||||
Ш 40Х80 |
80 |
32 |
1280 |
600 |
2650 |
|||||||||||||||||||||||||||||||||||||||||||
Таблиця 13
Основні дані броньових стрічкових магнітопроводов типу ШЛ
Тип магніто- провода |
Розміри , мм |
Пере-тин магні-топро-вода, см2 |
Дов-жина магніт-ної силової лінії, см |
Основ-ний параметр транс-форма-тора, см4 |
Орієнтована потужність |
||||||||||||||||||||||||||||||||||||||||||||
f, Гц |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
a |
h |
c |
C |
H |
b |
Sст |
lст |
SстS0 |
50 |
400 |
||||||||||||||||||||||||||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||||||||||||||||||||||||||||||||||||||
ШЛ 6Х6,5 |
6 |
15 |
6 |
25 |
22 |
6,5 |
0,39 |
4,7 |
0,35 |
- |
4,5 |
||||||||||||||||||||||||||||||||||||||
ШЛ 6Х8 |
8 |
0,48 |
0,43 |
- |
5 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 6Х10 |
10 |
0,6 |
0,54 |
- |
6 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 6Х12,5 |
12,5 |
0,75 |
0,67 |
- |
7 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 8Х8 |
8 |
20 |
8 |
33 |
29 |
8 |
0,64 |
6,8 |
1,02 |
- |
15 |
||||||||||||||||||||||||||||||||||||||
ШЛ 8Х10 |
10 |
0,8 |
1,28 |
- |
20 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 8Х12,5 |
12,5 |
1 |
1,6 |
- |
24 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 8Х16 |
16 |
1,28 |
2,05 |
- |
30 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 10Х10 |
10 |
25 |
10 |
40 |
35 |
10 |
1 |
8,5 |
2,5 |
- |
37 |
||||||||||||||||||||||||||||||||||||||
ШЛ 10Х12,5 |
12,5 |
1,25 |
3,12 |
- |
47 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 10Х16 |
16 |
1,6 |
4 |
- |
56 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 10Х20 |
20 |
2 |
5 |
- |
67 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 12Х12,5 |
12 |
30 |
12 |
48 |
42 |
12,5 |
1,5 |
10,2 |
5,4 |
3 |
80 |
||||||||||||||||||||||||||||||||||||||
ШЛ 12Х16 |
16 |
1,92 |
6,9 |
5 |
94 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 12Х20 |
12 |
30 |
12 |
48 |
42 |
20 |
2,4 |
8,7 |
7 |
112 |
|||||||||||||||||||||||||||||||||||||||
ШЛ 12Х25 |
25 |
3 |
10,8 |
10 |
135 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 16Х16 |
16 |
40 |
16 |
64 |
56 |
16 |
2,56 |
13,6 |
16,6 |
15 |
158 |
||||||||||||||||||||||||||||||||||||||
ШЛ 16Х20 |
|
|
|
|
|
20 |
3,2 |
|
20,5 |
22 |
195 |
||||||||||||||||||||||||||||||||||||||
ШЛ 16Х25 |
25 |
4 |
25,6 |
32 |
250 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 16Х32 |
32 |
5,1 |
32,6 |
40 |
300 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 20Х20 |
20 |
50 |
20 |
80 |
70 |
20 |
4 |
17,1 |
40 |
45 |
330 |
||||||||||||||||||||||||||||||||||||||
ШЛ 20Х25 |
|
|
|
|
|
25 |
5 |
|
50 |
54 |
380 |
||||||||||||||||||||||||||||||||||||||
ШЛ 20Х32 |
32 |
6,4 |
64 |
68 |
450 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 20Х40 |
40 |
8 |
80 |
86 |
510 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 25Х25 |
25 |
62,5 |
100 |
87,5 |
87,5 |
25 |
6,25 |
21,3 |
98 |
110 |
610 |
||||||||||||||||||||||||||||||||||||||
ШЛ 25Х32 |
|
|
|
|
|
32 |
8 |
|
125 |
135 |
730 |
||||||||||||||||||||||||||||||||||||||
ШЛ 25Х40 |
40 |
10 |
156 |
170 |
810 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 25Х50 |
50 |
12,5 |
195 |
210 |
990 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 32Х32 |
32 |
80 |
32 |
128 |
112 |
32 |
10,2 |
27,3 |
261 |
260 |
1200 |
||||||||||||||||||||||||||||||||||||||
ШЛ 32Х40 |
|
|
|
|
|
40 |
12,8 |
|
328 |
310 |
1400 |
||||||||||||||||||||||||||||||||||||||
ШЛ 32Х50 |
50 |
16 |
410 |
390 |
1650 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 32Х64 |
64 |
20,5 |
523 |
490 |
1940 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 40Х40 |
40 |
100 |
40 |
160 |
140 |
40 |
16 |
34,2 |
640 |
600 |
2200 |
||||||||||||||||||||||||||||||||||||||
ШЛ 40Х50 |
|
|
|
|
|
50 |
20 |
|
800 |
690 |
2500 |
||||||||||||||||||||||||||||||||||||||
ШЛ 40Х64 |
64 |
25,6 |
1025 |
850 |
3000 |
||||||||||||||||||||||||||||||||||||||||||||
ШЛ 40Х80 |
80 |
32 |
1280 |
1000 |
3500 |
||||||||||||||||||||||||||||||||||||||||||||
Таблиця14
Орієнтовані значення спадання напруги на обмотках
-
Час-тота, Гц
Падіння напруги
Сумарна потужність вторинних обмоток Sн, В.А
5…13
15…50
50…100
150…300
300…1000
1000…2500
50
%
20…13
13…6
6…4,5
4,5…3
3…1
%
25…18
18…10
10…8
8…6
6…2
400
%
10…8
8…4
4…1,5
1,5…1
1…0,5
0,5
%
8,5…10
10…5
5…2
2…1,2
1,2…0,5
0,5
Враховуючи, що ЕРС на один виток для кожної обмотки Евт=Еi /wi, одержуємо вираження для визначення числа витків первинної обмотки:
![]() ,
,
а також для кожної з вторинних обмоток.
ЕРС одного витка:
Eвт =4.44 .f .B .Sст .Kс .
У випадку регулювання вторинної напруги зміною числа витків первинної обмотки укладання виробляється по повному числу витків W1+Wрег, де Wрег визначається в залежності від ступеня регулювання за завданням (наприклад, при регулюванні 6% повне число витків первинної обмотки дорівнює W1+0,06W1).
Для того щоб розмістити обмотки в робочому просторі, потрібно накреслити вікно трансформатора і розташувати в ньому ізолюючий каркас, що виготовляється з ізоляційного картону товщиною 0,5...1,0 мм. По робочій висоті каркаса визначають число витків, розташовуваних в одному шарі, і повне число шарів, а також товщину кожної обмотки. Ескіз вікна з обмотками накреслюють у масштабі.
Число витків у шарі I-ї обмотки:
![]() ,
,
де: hсл – висота шару; Ку – коефіцієнт укладання, Ку = 0,85...0,95.
Висота шару первинної обмотки hсл1 дорівнює різниці між висотою вікна і подвоєною товщиною каркаса. Для кожної наступної обмотки висота шару зменшується на 0,5...1 мм.
Число
шарів I -ї обмотки
![]() заокруглюється до більшого цілого
числа.
заокруглюється до більшого цілого
числа.
Товщина котушки I -ї обмотки:
![]()
де:
![]() - товщина мїжшарової ізоляції, прийнята
за табл.15.
- товщина мїжшарової ізоляції, прийнята
за табл.15.
Таблиця 15
Товщина міжшарової ізоляції
Діаметр провода, мм |
Тип ізоляції и товщина, мм |
0,1; 0,2; 0,3 |
Конденсаторний папір 0,001; 0,002; 0,003 |
0,3…0,6 |
Намотувальний папір 0,05 |
0,6…0,9 |
Намотувальний папір 0,07 |
Понад 0,9 мм |
Кабельний папір 0,12 |
Товщина всіх котушок з обліком міжкотушкової ізоляції і товщини гільзи:
![]() ,
,
де:
Кр=
1,05. ..1,1;
![]() = 0.7.. .2 мм
(великі значення відносяться до більш
великих магнітопроводів) .
= 0.7.. .2 мм
(великі значення відносяться до більш
великих магнітопроводів) .
Зазор
![]() між котушкою і зовнішнім стрижнем при
номінальному значенні
вікна складає 0,5...2 мм.
При великих значеннях варто вибрати
сердечник з меншим вікном.
між котушкою і зовнішнім стрижнем при
номінальному значенні
вікна складає 0,5...2 мм.
При великих значеннях варто вибрати
сердечник з меншим вікном.
Задача 3. Асинхронний двигун з фазним ротором.
До пункту 2.
Г-подібна заступна схема і її параметри наведені в [ 1, с. 258-282, 3, с. 146-149].
Опори обмоток статора і ротора задані у табл. 4, а для визначення опорів вітки намагнічування Rm i Xm треба скористуватися заданими параметрами холостого ходу з урахуванням енергетичної діаграми активної поттужності для цього режима. Після визначення Xm розраховується спрощене значення коефіцієнта С1.
До пункту 3.
Для визначення усіх величин у номінальному режимі слід за заданою частотою обертання ротора nн визначити синхронну частоту обертання поля статора n1 і номінальне ковзання sн. Увесь подальший розрахунок вести з використанням Г-подібної заступної схеми, з урахуванням енергетичної діаграми двигуна для режиму навантаження і рівнянь для електромагнітного момента двигуна.
При з'єднанні обмотки статора зіркою номінальна фазна напруга:
![]()
а фазний струм дорівнює лінійному:
![]()
При з'єднанні обмотки статора трикутником номінальна фазна напруга:
![]()
а
фазний
струм:
![]()
3.3. Номінальний електромагнітний обертальний момент двигуна, Н . м
 ,
,
де:
![]() синхронна кутова швидкість обертання
магнітного поля;
синхронна кутова швидкість обертання
магнітного поля;
m1 - число фаз.
Номінальний обертальний момент на валу машини:
М2н=9550Рн/nн,
де: Рн – номінальна потужність, кВт.
Момент холостого ходу визначається як різниця між електромагнітним моментом і моментом на валу:
М0 = М - М2н.
Максимальний електромагнітний обертальний момент двигуна, Н . м:
Кратність максимального моменту:
![]() .
.
3.4. Струм статора при пуску двигуна (s=1) із замкненим накоротко ротором без обліку струму, що намагнічує, у цьому режимі визначається за спрощеною заступною схемою:
![]() .
.
Дійсний струм ротора при пуску двигуна з короткозамкненим ротором:
![]() ,
,
де: Ki - коефіцієнт трансформації по струму системи статор-ротор;
Для АМ з фазним ротором Кi=Ке; Ке— коефіцієнт трансформації по ЕРС системи статор-ротор:
![]()
де: Е1 – ЕРС обмотки статора:
Е1=Кн . Uф.
Для АД з фазним ротором коефіцієнт Кн=0,95...0,98.
Треба нагадати, що обмотки ротора з’єднуються за схемою “зірка”, тому:
![]() Коефіцієнт потужності двигуна при
пуску з короткозамкненим ротором:
Коефіцієнт потужності двигуна при
пуску з короткозамкненим ротором:
![]() .
.
Обертальний момент при пуску двигуна з замкненим накоротко ротором (на природній характеристиці):
![]() .
.
Необхідно зробити висновок про можливість запуску двигуна з короткозамкненим ротором при номінальному навантаженні.
3.5. Приведений опір фази пускового реостата, необхідний для одержання при пуску максимального значення моменту, визначається з умови sn=sk=1, тобто:
![]() ,
,
відкіля:
![]() .
.
Дійсне значення опору фази пускового реостата
![]() .
.
3.6. Струм статора при пуску двигуна з реостатом (на штучній характеристиці):
![]()
Дійсний струм ротора при пуску двигуна з реостатом, що забезпечує максимальне значення пускового моменту:
I2nш = I1nшKi.
Коефіцієнт потужності при реостатної пуску двигуна:
![]()
Необхідно проаналізувати причини збільшення коефіцієнта потужності при пуску з реостатом у порівнянні з пуском без реостата.
3.7. Кратність пускового моменту при пуску двигуна: з короткозамкнутим ротором:
![]() .
.
Кратність пускового моменту при реостатному пуску двигуна:
![]() .
.
Відповідні значення кратності пускового струму:
![]()
Порівнявши отримані результати обчислень, можна зробити висновок, що введення опору пускового реостата в коло ротора АД збільшує пусковий момент при зменшенні пускового струму.
До пункту 4. Природну механічну характеристику АД розраховують по рівнянню:
 .
.
Для розрахунку природної характеристики варто задаватися низкою значень ковзання s від нуля до 1,0 (з обов'язковим обліком s= sk і s= sн ), і знаходити для них значення Мп. Частота обертання ротора визначається для кожного значення ковзання
n = n1 .(1 - s).
Розрахунки доцільно звести в табл.16.
Таблиця 16
Результати розрахунку природної механічної характеристики
-
s
0
sн
0,05
0,1
sk
0,2
0,4
0,6
0,8
1,0
n, об/хв
Mп, Н-м
За даними табл.16 будують графік природної механічної характеристики, що має наступні характерні точки: точку ідеального холостого ходу (n=n1, s=0, M=0), точку номінального режиму (n=nн, s=sн, M=Mн), точку максимального моменту (s=sk, M=Mmax), точку пуску двигуна (n=0, s=1, M=Мnе). По вісі абсцис у масштабі відкладають значення s, а по вісі ординат – M і будують графік залежності M = f(s) .
До пункту 5. Штучну реостатну механічну характеристику АД при включенні у коло ротора опору по п.3.5 розраховують по рівнянню:
 .
.
Подальші розрахунки і побудови виконують аналогічно п.4.
До пункту 7. Криву I2 = f(s) розраховують по рівнянню:
До пункту 8. Спрощений запис механічної характеристики представляється у вигляді формули Клосса:
![]() ,
,
де: М – значення моменту, яке відповідає значенню ковзання s.
Для розрахунку механічної характеристики варто задати ряд значень s (аналогічно п.4). Результати розрахунку доцільно звести в таблицю.
До пункту 9. У теорії ЕМ прийнято розподіл споживаної двигуном потужності з мережі при електромеханічному перетворенні енергії представляти у вигляді енергетичної діаграми. У ній потужності і втрата енергії на відповідних ділянках діаграми дорівнюють ширині цих ділянок:
Р1 – потужність, яка підводиться до статора АД з мережі;
Pс – магнітні втрати на гистерезис і у вихрові струми в сталі магнітопровода статора;
Рел1 – електричні утрати потужності в обмотці статора:
Рел1= m1 .І1ф2 . R1;
Рем – електромагнітна потужність, яка передається обертовим магнітним полем ротору через повітряний зазор:
Рем=Р1 - (Рс1+Рел1);
Рел2 – електричні утрати потужності в обмотці ротора:
Рмех – повна механічна потужність ротора:
Рмех= Рем - Рел2 ;
Рмх – механічні втрати в двигуні на тертя в підшипниках, тертя щіток об кільця, тертя ротора об повітря, включаючи втрати на вентиляцію;
Рдод – додаткові втрати, які обумовлені зубцевою поверхнею статора і ротора:
![]() ;
;
Р2 – корисна потужність на валу машини.
Втрати в сталі статора і механічні утрати приблизно рівні. Тоді:
![]()
де:
![]() –
сумісні
втрати потужності в двигуні,
–
сумісні
втрати потужності в двигуні,
![]() .
.
З іншого боку:
![]() =Р1
– Р2
.
=Р1
– Р2
.
У контрольній роботі на енергетичній діаграмі ширину ділянок, що відповідають розрахунковим потужностям, варто зображувати пропорційно цим потужностям.
Задача № 4. Асинхронний виконавчий двигун (АВД).
До пункту 3. Відносна частота обертання ротора АВД:
![]() ,
,
де: n – частота обертання ротора;
n1 = 60f1/p – синхронна частота обертання.
У випадку, якщо в завданні частота обертання, об/хв, ротора не визначена, її варто обчислити через номінальну потужність і момент:
![]() .
.
До
пункту 4.
АВД
розвиває максимальний обертальний
момент при круговому
обертовому магнітному полі, що має місце
при пуску двигуна
з ефективним коефіцієнтом сигналу
![]() .
При амплітудному керуванні:
.
При амплітудному керуванні:
![]() ,
,
причому коефіцієнт трансформації можна визначити за номінальним значенням напруг Uy і Uв , що приведені в завданні.
Знаючи
відносну частоту обертання ротора і
номінальний обертальний
момент Мн
при
![]() = 1, можна визначити максимальний пусковий
момент
(якщо
відносний момент визначити по механічній
характеристиці, зображеної
на рис.5),
Н
.
м:
= 1, можна визначити максимальний пусковий
момент
(якщо
відносний момент визначити по механічній
характеристиці, зображеної
на рис.5),
Н
.
м:
![]()
Рисунок
5.2
-
Графічне визначення відносного моменту
АВД
по
механічній характеристиці: 1)
=1;
2)
=0,75;
3)
=0,5.
Менш точно mн можна визначити з рівняння механічної характеристики ідеалізованого АВД:
![]() ,
,
тому що в ідеалізованому АВД механічні характеристики прямолінійні, у той час як у реальному двигуні вони криволінійні.
До пункту 5. При визначенні напруги рушіння варто скористатися графіками регулювальних характеристик (у відносних одиницях), приведених у рекомендованій літературі. Визначеному відносному моменту відповідає ефективний коефіцієнт сигналу.
До
пункту 6.
Попередньо варто визначити частоту
обертання
ротора
при заданих умовах (
і m
), після чого відносне значення
механічної потужності з відповідних
графіків Рмех
=
f(![]() )
при
= const знаходиться відомим способом.
)
при
= const знаходиться відомим способом.
До
пункту 8.
ККД
двигуна
![]() .
.
Задача № 5. Синхронний двигун.
До пункту 2. Визначаються фазні значення напруги і струму синхронного двигуна. З огляду на те, що обмотки статора з'єднані зіркою, одержуємо:
![]() ;
;
Iф = Iл .
Повний опір однієї фази обмотки статора, Ом:
Z=Uф / Iф .
Абсолютні індуктивні опори Xd , Xq визначаються через їх задані відносні значення, Ом:
![]()
Індуктивний
опір розсіювання обмотки якоря
![]() ,
в.о.:
,
в.о.:
![]() ,
,
відкіля:
![]() .
.
Абсолютне значення, Ом:
![]() .
.
До пункту 3. Обертальний момент на валу машини, Н . м:
![]() ,
,
де: Рн – номінальна потужність, кBт;
![]() –
кутова
швидкість обертання
ротора.
–
кутова
швидкість обертання
ротора.
До пункту 4. Векторну діаграму зручно будувати у відносних одиницях. Діаграму напруг перезбудженого двигуна при заданих номінальних
значеннях струму (Iфн* = 1) і напруги (Uфн* = 1) будують у наступному порядку:
1. Спочатку будують універсальну характеристику холостого ходу (рис. 6).
2. В тому ж масшстабі, як і на характеристиці холостого ходу, проводять в напрямі вісі ординат вектор напруги U і під кутом =arccos до нього — вектор випереджального фазного струму I (рис.6).
3. Під кутом 900 до вектора I з кінця вектора U проводять вектор j .I .Xпадіння напруги на на індуктивному опорі розсіювання. Отримаєм вектор ЕРС Eякий відповідає результівному потоку у зазорі машини.
4. По характеристиці холостого ходу (точка А) знаходимо МРС F, яка необхідна для створювання потока . Будуємо вектор F перпендикулярно до вектора EДо нього добудовуємо вектор Fа/ (його визначення очевидно з рис. 6). Вектор Fа/ співпадає за напрямом з вектором струму I і показує величину МРС реакції якоря, яка приведена до обмотки збудження.
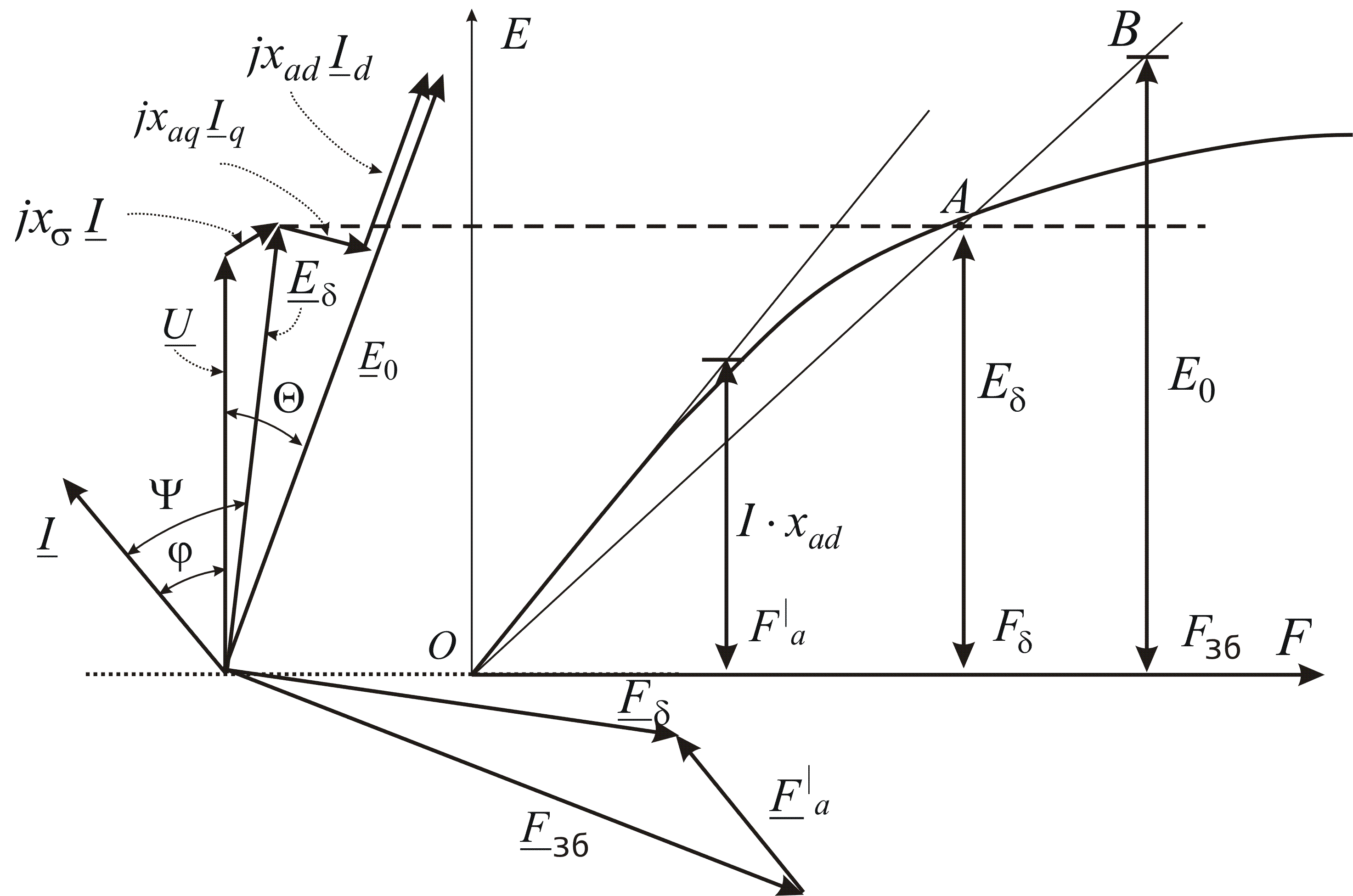
Рисунок 5.3 - Векторна діаграма перезбудженого СД
5. З початку координат до початку вектора Fа/ проводять прямий відрізок, який відповідає МРС збудження Fзб . ПротиЕРС -E0 випереджає його на 900. Подальше будування діаграми очевидно. З векторної діаграми визначаємо кут навантаження н для номінального момента на валу двигуна.
По основному комплексному рівнянню синхронної машини може бути побудована векторна діаграма. Однак для СД в основне рівняння замість напруги машини U треба підставити -Uc , тому що термін "напруга двигуна" звичайно не вживається. При цьому для явнополюсного СД:
-Uc = E0 – j .I d .Xd – j .Iq .Xq ,
де: E0 – ЕРС обмотки якоря при холостому ході синхронної машини (при скиданні навантаження);
Id, Iq- подовжня і поперечна складові струму якоря I:
![]()
Д о
пункту 5.
Під кутовою характеристикою розуміють
залежність електромагнітного
моменту Mем
(чи електромагнітної потужності Рем
) від
кута
між ЕРС
Е0
і напругою -Uc.
Кутова характеристика
повинна
бути побудована для абсолютних значень
Мем
у діапазоні зміни
кута
від 0
до 180°
(рис.7).
о
пункту 5.
Під кутовою характеристикою розуміють
залежність електромагнітного
моменту Mем
(чи електромагнітної потужності Рем
) від
кута
між ЕРС
Е0
і напругою -Uc.
Кутова характеристика
повинна
бути побудована для абсолютних значень
Мем
у діапазоні зміни
кута
від 0
до 180°
(рис.7).
Розрахунок Мем проводиться по рівнянню:
![]() ,
,
де:
![]() ;
;
Е0 – ЕРС в обмотці статора. Для її визначення використовуємо діаграму Потьє: через точку А і початок координат проводимо пряму; на вісі абсцис відкладаєм значення Fв і проводимо перпендикуляр до перетину з прямою ОА. Відрізок ВС у прийнятому масштабі і є питома ЕРС Е0.
В рівняння моменту підставляють значення параметрів Xd і Xq для ненасиченої машини і ЕРС Е0, визначену з векторної діаграми і
приведену
до абсолютного значення (Е0
= Еo*
Uфн).
По кутовій характеристиці
визначають кут навантаження
![]() ,
при якому двигун розвиває максимальний
обертальний момент.
,
при якому двигун розвиває максимальний
обертальний момент.
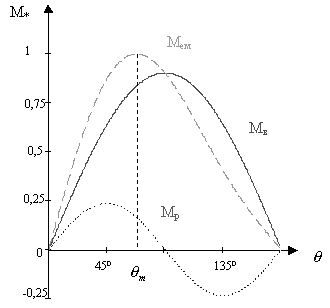
Рисунок 5.4 - Кутова характеристика СД: Мв - складова момента, що залежить від струму збудження; Мр - реактивна складова момента;
Мем – сумарний електромагнітний момент
До пункту 6. Статична перевантажувальна здатність двигуна
![]() ,
,
причому
![]() варто обчислити для кута
варто обчислити для кута
![]() ,
визначеного по векторній
діаграмі. Статична
перевантажувальна
здатність для СД
загального
призначення повинна бути не нижче
1,65.
Електромагнітний момент при куті
перевищує момент на валу
М2н
на значення момента холостого ходу
М0,
обумовленого механічними
втратами в двигуні. Це дозволяє
контролювати правильність побудови
векторної діаграми і визначення по ній
кута навантаження.
,
визначеного по векторній
діаграмі. Статична
перевантажувальна
здатність для СД
загального
призначення повинна бути не нижче
1,65.
Електромагнітний момент при куті
перевищує момент на валу
М2н
на значення момента холостого ходу
М0,
обумовленого механічними
втратами в двигуні. Це дозволяє
контролювати правильність побудови
векторної діаграми і визначення по ній
кута навантаження.
До пункту 7. Векторну діаграму (рис. 6) використовуємо також для побудування U-подібних характеристик двигуна (рис.9). При цьому будемо рахувати, що вектор F перпендикулярний до вектора напруги U . Тоді отримаєм наступну векторну діаграму (рис.8), де ОАІ , ОВІ , ОСІ , ОDI – вектори струму I, кінці яких ковзають по лінії, яка перпендикулярна до вектора напруги U; ОАзб , ОВзб , ОСзб , ОDзб – вектори МРС Fзб*.
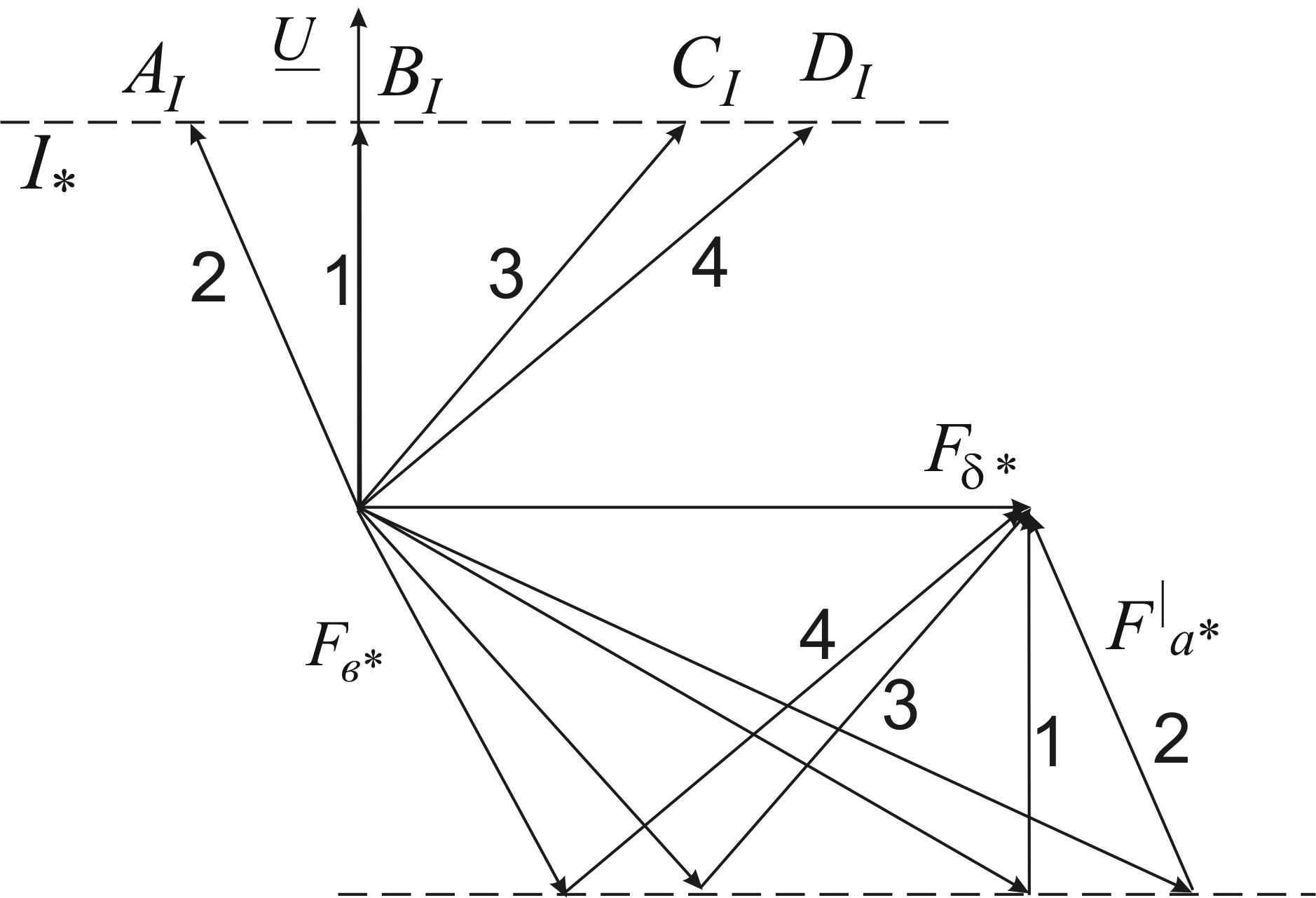
Рисунок 5.5 - До побудування V- подібних характеристик синхронного двигуна
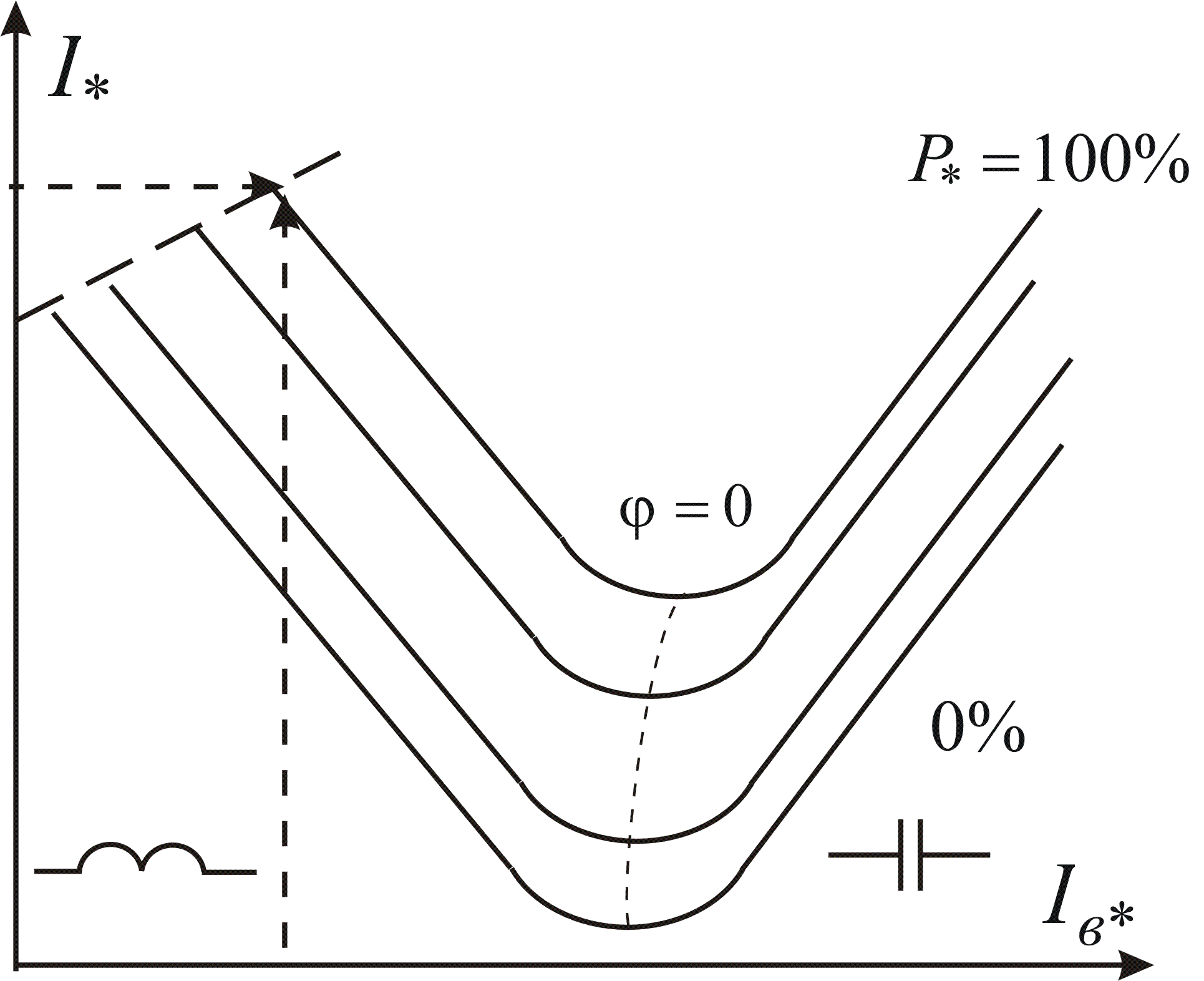
Рисунок 5.6 - V- подібні характеристики синхронного двигуна
До пункту 8. Активна потужність на затискачах двигуна:
![]() .
.
Для явнополюсного СД без обліку втрат у міді обмоток статора:
![]() .
.
Реактивна потужність:
![]() ,
або
,
або
![]() ,
,
де: S – удавана (повна) потужність двигуна:
![]() .
.
До пункту 10. Активна потужність, що розвивається двигуном без збудження:
![]() .
.
Задача № 6. Двигун постійного струму.
До пункту 1. Для визначення струму Iн, споживаного двигуном з мережі, спочатку знаходять потужність, споживану двигуном з мережі при номінальному навантаженні:
![]() .
.
Тоді:
![]() .
.
Струм у колі якоря при номінальному навантаженні:
Iан=Ін – Ізб,
де: Iзб – струм збудження обмотки паралельного збудження,
![]()
Тут:
![]() —
опір обмотки збудження в нагрітому
стані при
75 °С (у завданні - при 20 °С).
—
опір обмотки збудження в нагрітому
стані при
75 °С (у завданні - при 20 °С).
До пункту 2. Потужність Рн (кВт) і момент M2н (Н .м) на валу і частота обертання вала nн (об/хв) зв'язані між собою співвідношенням:
![]() .
.
Електромагнітний момент:
М = См .Фб .Iан ,
де:
См
- постійна машини,
![]() ;
;
![]() -
магнітний потік.
-
магнітний потік.
Для визначення магнітного потоку необхідно скористатися основним рівнянням рівноваги ЕРС двигуна постійного струму:
![]() .
.
Відкіля,
знаючи ЕРС Eа
,
можна визначити магнітний потік
![]() :
:
![]() ,
,
де:
![]() - постійна машини,
- постійна машини,
![]() .
.
До пункту 3. Максимальний припустимий по струму якоря пусковий обертальний момент:
![]() .
.
У момент пуску якір двигуна нерухомий ( n=0 ), тому струм якоря:
![]() ,
,
відкіля
при
![]() можна визначити опір пускового реостата
Rn,
що забезпечує пусковий момент Mn
max
.
можна визначити опір пускового реостата
Rn,
що забезпечує пусковий момент Mn
max
.
До пункту 4. Для двигуна з паралельним збудженням, у якого магнітний потік =const, рівняння природної механічної характеристики:
![]() ,
,
а графік цієї характеристики – пряма лінія, яку будують по двох точках: ідеального холостого ходу (М = 0) і номінального режиму роботи (для чого у формулу необхідно підставити електромагнітний момент М, визначений у п.2).
Значення частоти обертання n, обчислене для номінального режиму роботи, повинне збігатися з заданим значенням nн.
До пункту 5. Рівняння штучної механічної характеристики:
![]() .
.
Її будують по двох точках: ідеального холостого ходу (М = 0) і пуску двигуна ( n =0).
До пункту 6. Струм збудження зменшиться до значення
![]() .
.
Для
знаходження магнітного потоку
![]() варто скористатися приведеною
в табл.17 залежністю магнітного потоку
від струму збудження
Iзб
. За одиницю прийняті номінальні значення
відповідно магнітного
потоку і струму збудження.
варто скористатися приведеною
в табл.17 залежністю магнітного потоку
від струму збудження
Iзб
. За одиницю прийняті номінальні значення
відповідно магнітного
потоку і струму збудження.
Таблиця 17