

6. Оформление отчета
В отчете должны быть приведены структурные схемы исследуемых систем; результаты аналитического и экспериментального определения области возможных положений равновесия и фазовые траектории, соответствующие различным положениям равновесия (п. 5.2); параметры предельного цикла и его вид (п.5.3); фазовые траектории, соответствующие различным типам установившихся движений (п.5.4); графики установившихся процессов и кривая захвата (п.5.5); зависимость амплитуды выходного сигнала от частоты (п.5.6).
7. Контрольные вопросы
Назовите основные особенности поведения, которые могут наблюдаться в нелинейных автоматических системах.
Сколько и какие положения равновесия может иметь устойчивая автономная линейная система?
Какие движения нелинейных систем называются автоколебаниями? В чем их отличие от периодических движений линейных систем?
Типичная зависимость амплитуды захвата от частоты
 представлена на рис.7.
представлена на рис.7.
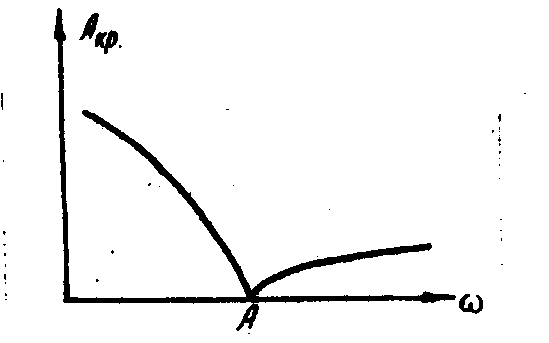
Рис.7.
Частоту каких движений системы определяет точка А графика?
5. Возможно ли положение равновесия в системе, структурная схема которой приведена на рис.8? Если возможно, то при каком условии?
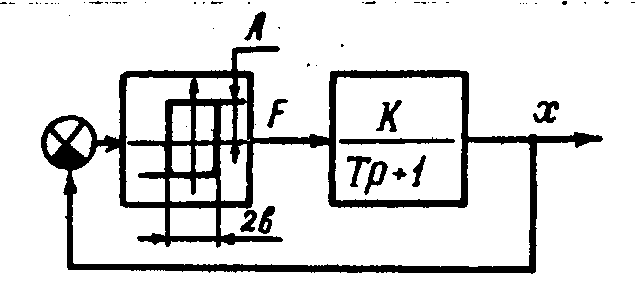
Рис. 8
Библиографический список
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975. – 767 с.
2. Воронов А. А. Основы теории автоматического управления: Особые линейные и нелинейные системы. –-М.: Энергоиздат, 1981.– 304 с.