

Мероприятия по технике безопасности при эксплуатации месильной машины
При подключении машины к электросети, зануление машины должно быть произведено в соответствии с действующими правилами и нормами монтажа электроустановок и требованиями безопасности. Установить правильное направление вращения привода тестомесильной машины. Перед началом работы необходимо привести в порядок одежду, застегнуть халат и обшлага рукавов, подобрать волосы под головной убор; произвести внешний осмотр машины, убрать с машины и вокруг нее посторонние предметы убедиться в отсутствии посторонних предметов в месильной части машины; проверить наличие смазки в местах подлежащих смазке; включить машину на холостом ходу., убедиться в ее исправности; проверить работу электроблокировок, при открывании перфорированной крышки месильной части и двери привода разгрузителя муки машин должна остановиться.
Во время работы содержать рабочее место в чистоте и порядке, не загромождать проходы. Запрещается оставлять машину без периодического присмотра. Немедленно остановить машину с отключением вводного выключателя в следующих случаях: при временном прекращении работы: при выявлении электрического напряжения на корпусе машины; при выявлении повышенного стука, шума и вибрации; при прекращении подачи одного из компонентов в машину при ручном режиме работы, при неисправности одного из блокирующих устройств. По окончанию работы отключить вводный выключатель и очистить месильную часть машины и наружные поверхности от теста.
БИЛЕТ № 6, ВОПРОС № 3
Уравновешивание сил инерции пищевых машин и автоматов
Механизм является уравновешенным, если, работая в установившемся режиме, он действует на фундамент с некоторыми постоянными по величине и направлению силами и моментами. Неизбежные погрешности изготовления, неоднородность материала и возможные деформации звеньев (отдельных деталей) вызывают смещение центра масс системы относительно оси вращения. Указанные обстоятельства вызывают динамические нагрузки в кинематических парах: вибрационные механизмы и нарушения плавности движения.
Массы звеньев (деталей), силы инерции которых вызывают дополнительные нагрузки на опоры, называют неуравновешенными массами. Устранение или уменьшение дополнительных динамических нагрузок на опоры механизма (машины) называют уравновешиванием масс.
Задача уравновешивания состоит в определении опорных реакций и применении специальных средств, устраняющих их, или, по крайней мере, сводящих к допустимому минимуму вибраций, а следовательно, и шума в системе механизма и машины.
Уравновешивание вращающихся масс
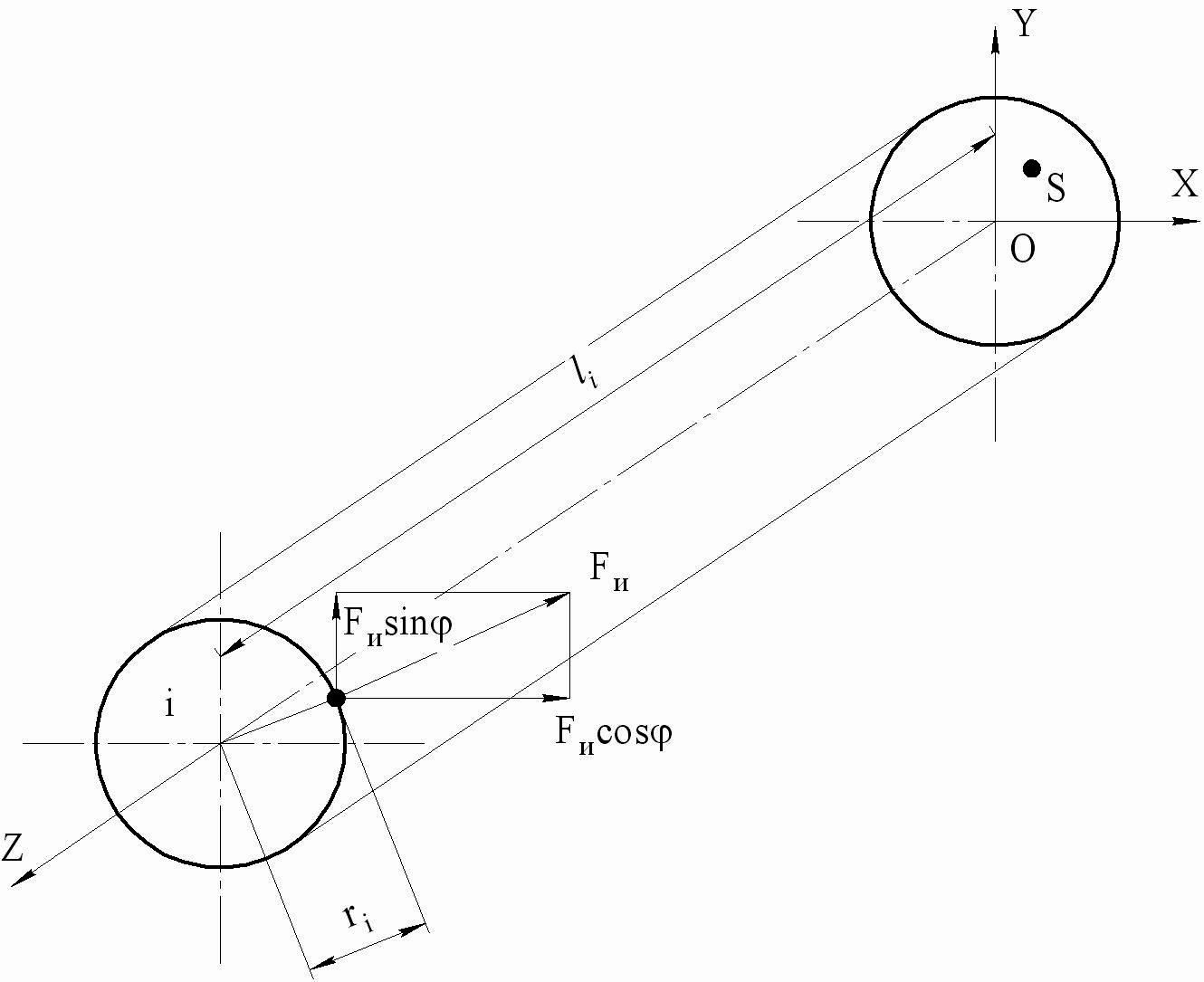
Рассмотрим тело,
центр масс которого находится в точке
S.
Свяжем с этим телом систему координат
так, чтобы плоскость XOY
проходила через центр масс, а ось OZ
совпадает с осью вращения тела. Тогда
в каждой элементарной массе mi,
расположенной, например, в плоскости i
на расстоянии ri
от оси OZ,
соответствует направленная по радиусу
сила инерции
![]() ,
где
– угловая скорость вращения тела
(ротора). Сила Fиi,
разложенная на две составляющие, создает
относительно осей y
и x
моменты
,
где
– угловая скорость вращения тела
(ротора). Сила Fиi,
разложенная на две составляющие, создает
относительно осей y
и x
моменты
![]() ,
,
![]() .
.
Результирующая сила инерции всего тела, или главный вектор дисбалансов, равен
![]() ;
;
произведение
![]() является статическим моментом, где m
– масса всего тела; rs
– расстояние центра масс S
от оси вращения.
является статическим моментом, где m
– масса всего тела; rs
– расстояние центра масс S
от оси вращения.
Результирующий момент всех сил инерции (главный момент) относительно плоскости, проходящей через центр масс,
![]() ,
,
где
![]() – центробежный момент инерции относительно
оси вращения м плоскости, перпендикулярной
оси вращения и проходящей через центр
масс тела. Силы инерции масс, расположенных
в параллельных плоскостях, подлежат
динамическому уравновешиванию.
– центробежный момент инерции относительно
оси вращения м плоскости, перпендикулярной
оси вращения и проходящей через центр
масс тела. Силы инерции масс, расположенных
в параллельных плоскостях, подлежат
динамическому уравновешиванию.
Условием полного уравновешивания является равенство нулю главного вектора сил инерции и главного момента сил инерции
![]() ,
,
![]() .
.
Первое условие будет выполнено только при rs=0, когда центр масс тела S лежит на оси вращения, а второе условие выполняется в том случае, когда ось вращения совпадает с одной из главных осей инерции тела.
Тело считается
уравновешенным статически, если
выполняется только первое условие. В
этом случае центр масс тела лежит на
оси вращения, rs=0.
Однако ось вращения тела не совпадает
с одной из главных осей инерции и поэтому
момент инерции
![]() и результирующий момент сил инерции
Mиi
не равны нулю.
и результирующий момент сил инерции
Mиi
не равны нулю.
Тело считается уравновешенным динамически, если выполняется только второе условие. В этом случае тело вращается вокруг одной из главных осей инерции и результирующий момент сил инерции равен нулю, однако эта ось не является главной центральной осью инерции и поэтому не проходит через центр масс тела S, а результирующая сила инерции Fи динамически уравновешенного тела не равна нулю. Мерой статической неуравновешенности, или статического дисбаланса вращающегося тела является величина . Мерой динамической неуравновешенности, или динамического дисбаланса, служит величина .
Моментная
неуравновешенность возникает тогда,
когда центр масс S
тела находится на оси вращения, а главная
центральная ось инерции тела наклонена
к оси вращения тела под некоторым углом.
В этом случае rs=0;
![]() ;
;
![]() .
Моментная неуравновешенность выражается
главным моментом дисбалансов тела
.
Моментная неуравновешенность выражается
главным моментом дисбалансов тела
![]() .
.
Устранение этого момента производится не менее чем двумя корректирующими массами (противовесами).
Причинами дисбаланса могут быть: погрешности при изготовлении, неоднородность материала, неточность монтажа и т.д. Практически любая деталь имеет некоторую неуравновешенность, которая при быстром вращении приводит к недопустимым вибрациям, а иногда к поломкам.
Статическая балансировка
Статический дисбаланс возникает в результате смещения центра тяжести детали по отношении к оси ее вращения из-за неоднородности металла, неточности обработки детали или неправильной посадки ее на вал. В этом случае при вращении возникает неуравновешенная центробежная сила.
Если центр масс S не лежит на оси вращения, то при отсутствии вращения дисбаланс будет стремиться повернуть звено (ротор) в такое положение, при котором центр масс окажется под осью вращения. Если проворачивать деталь около положения устойчивого равновесия, тот после прекращения движения центр масс S окажется под осью вращения и балансировочный грузик устанавливают выше оси вращения на вертикальной линии, проходящей через точку S и ось вращения. В результате ряда попыток можно установить, какую массу должен иметь балансир для того, чтобы деталь оказалась в безразличном равновесии. Далее балансировочный груз взвешивают и с помощью простейших расчетов определяют место его крепления. Балансировку можно осуществлять, удаляя металл (методом резания) вблизи центра масс. Статической балансировке подвергаются вращающиеся детали дисковой формы, у которых диаметр больше толщины. В противном случае вместо уравновешиваемой силы можно получить неуравновешенный момент, так как плоскость расположения неуравновешенной массы неизвестна.
Динамическая балансировка
Вращающиеся детали, имеющие значительную длину L вдоль оси вращения по отношению к диаметру D (L/D >> 1), например, роторы электродвигателей, барабаны сепараторов и т.д., не могут быть полностью уравновешены статическим способом.
Неуравновешенные массы в таких деталях при вращении создают динамическую неуравновешенность. Известно, что любое состояние несимметрично относительно оси вращения расположения масс какой-либо вращающейся системы может быть представлено в виде только двух дисбалансов, приведенных к двум произвольно выбранным (балансировочным) плоскостям I и II вращающегося тела, перпендикулярным оси вращения. При этом желательно, чтобы данные плоскости отстояли дальше друг от друга, так как увеличение плеча повышает точность балансировки. Наличие динамических дисбалансов создает возмущающую пару сил (момент), изменяющих свое направление за один оборот детали, который при ее вращении будет стремиться повернуть ось детали относительно оси вращения, что вызовет перегрузку подшипников. Задача динамической балансировки заключается в определении величин этих двух приведенных дисбалансов и их радиальных направлений в конкретно назначенных плоскостях I и II. Приведенные дисбалансы практически можно определить только при вращении балансируемой детали, т.е. динамически (отсюда название – динамическая балансировка). Это проводят на специальных балансировочных станках.
Балансировочный станок позволяет измерить центробежные силы или моменты этих сил, действующих на вал балансируемой детали, приведенной во вращательное движение. О величинах указанных сил или моментов судят по вызываемым этими силами колебаниям оси балансируемой детали, установленной на балансировочном станке.
Рассмотрим станок люлечного типа.
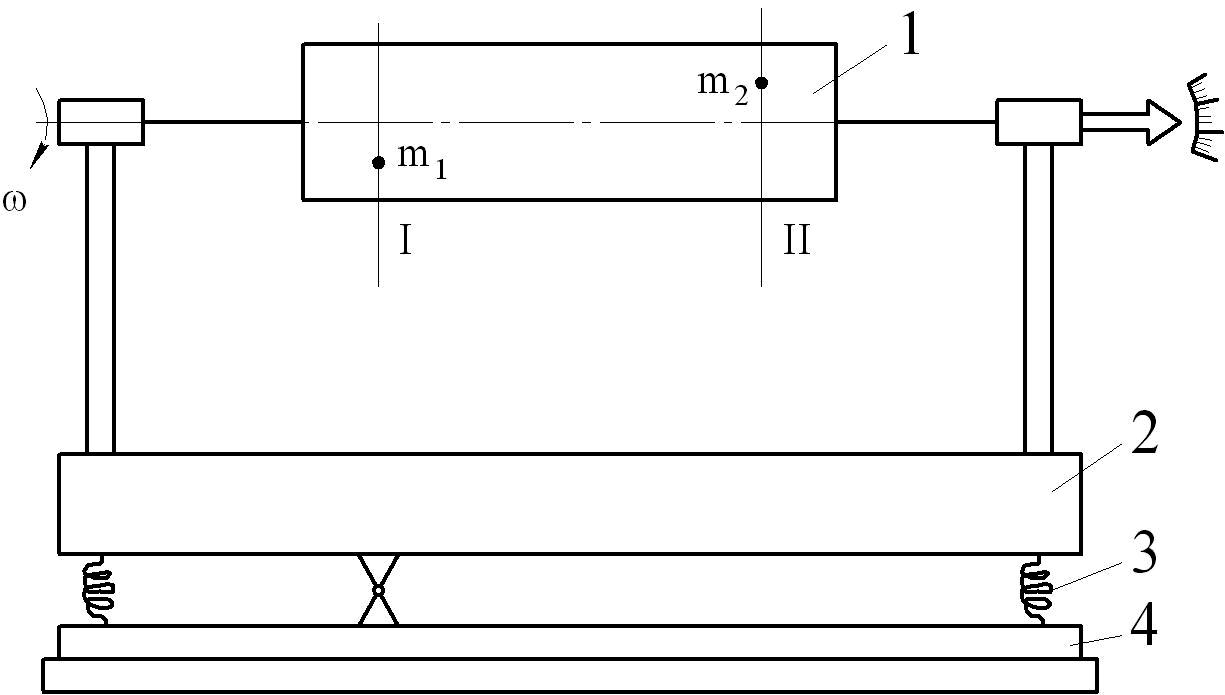
Балансируемая деталь 1 устанавливается в подшипниках на люльку 2, шарнирно прикрепленную к стойке 3 с помощью пружин 4. Уравновешивание производится в двух плоскостях I и II, которые выбирают из конструктивных соображений. В начале балансировки одна из плоскостей I должна обязательно лежать на оси, проходящей через центр шарнира люльки. При этом балансировка будет проходить в плоскости II. При равномерном вращении тела неуравновешенные массы m1 и m2 вызовут появление сил инерции, которые создадут момент относительно шарнира и люлька вместе с балансируемой деталью начнет колебаться. Эти колебания будут гармоническими и амплитуда их будет пропорциональна неуравновешенной массе m2. Обычно колебания люльки фиксируют электрическими датчиками. Токи, возникающие в них, усиливаются и поступают в специальные электрические счетные устройства. Результаты вычислений предаются на приборы, по показаниям которых определяют значение и положение неуравновешенной массы m2. Для определения величины и положения неуравновешенной массы m1 балансируемую деталь переставляют на люльке 2 так, чтобы плоскость II проходила через шарнир. В таком случае колебания люльки будут вызываться только силой инерции массы m1 и по амплитуде колебания производится уравновешивание. Ликвидацию дисбаланса осуществляют также, как и при статической балансировке, например удалением слоя металла.