

Переносчики и каналы.
Отдельно
Устойчивость и неустойчивость стационарного состояния (на примере гидродинамической модели).
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СТАЦИОНАРНЫХ СОСТОЯНИЙ НЕЛИНЕЙНЫХ СИСТЕМ ВТОРОГО ПОРЯДКА
Метод Ляпунова линеаризации систем в окрестности стационарного состояния. Примеры исследования устойчивости стационарных состояний моделей биологических систем. Уравнения Лотки. Уравнения Вольтерра. Метод функции Ляпунова
Пусть биологическая система описывается системой двух автономных дифференциальных уравнений второго порядка общего вида:
 (5.1)
(5.1)
Стационарные значения переменных системы определяются из алгебраических уравнений:
![]() (5.2)
(5.2)
Стационарные состояния соответствуют особым точкам дифференциального уравнения первого порядка, определяющего интегральные кривые:
![]() (5.3)
(5.3)
Математический анализ поведения траекторий этой системы на фазовой плоскости связан с именами французского математика Анри Пуанкаре и русского математика и механика Александра Михайловича Ляпунова (1857-1918).
Ляпунов показал, что в большом числе случаев анализ устойчивости стационарного состояния нелинейной системы можно заменить анализом устойчивости системы, линеаризованной в окрестности стационарного состояния.
Рассмотрим характер поведения переменных при некотором небольшом отклонении системы от состояния равновесия. Введем вместо переменных x, y новые независимые переменные , , определив их как смещения относительно равновесных значений переменных
![]() (5.4)
(5.4)
Подставив эти выражения в (5.1), получим:
 (5.5)
(5.5)
![]() ,
так как
,
так как ![]() -
координаты особой точки.
-
координаты особой точки.
Предположим, что функции P и Q непрерывны и имеют непрерывные производные не ниже первого порядка. Тогда мы можем разложить правые части уравнений (5.5) в ряд Тейлора по переменным , .
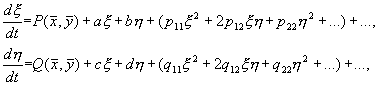 (5.6)
(5.6)
где
 (5.7)
(5.7)
Учтем, что по определению особой точки
![]()
и отбросим в уравнениях (5.6) нелинейные члены. Получим систему линейных уравнений с постоянными коэффициентами — систему первого приближения:
 (5.8)
(5.8)
Решение этой системы было рассмотрено в Лекции 4. Оно определяется корнями характеристического уравнения системы:
![]() (5.9)
(5.9)
Ляпунов показал, что в случае, если оба корня уравнения (5.9):
![]() (5.10)
(5.10)
имеют отличные от нуля действительные части, исследование уравнений первого приближения (5.8) всегда дает правильный ответ на вопрос о типе устойчивости состояния равновесия в системе (5.1). А именно:
если оба корня имеют отрицательную действительную часть и, следовательно, все решения уравнений первого приближения (5.8) затухают, то состояние равновесия устойчиво;
если хотя бы один корень имеет положительную действительную часть, то есть система (5.8) имеет нарастающие решения, то состояние равновесия неустойчиво.
Если действительные части обоих корней характеристического уравнения равны нулю или если один корень равен нулю, а другой отрицателен, то уравнения (5.8) не дают ответа на вопрос об устойчивости состояния равновесия, и необходимо рассматривать члены более высокого порядка малости в разложении в ряд Тейлора правых частей уравнений (5.6).
В случае, когда оба корня характеристического уравнения имеют отличные от нуля действительные части (грубые системы), уравнение первого приближения определяют не только устойчивость стационарного состояния, но и характер фазовых траекторий в достаточно малой его окрестности.
Как и в случае линейных уравнений (Лекция 4) здесь возможны пять типов грубых состояний равновесия: устойчивый узел, неустойчивый узел, устойчивый фокус, неустойчивый фокус и седло. Для исследования типов состояний равновесий удобно пользоваться диаграммой, изображенной на рис. 4.11. Для системы (5.1):
![]() ,
,![]() (5.11)
(5.11)
 . (5.12)
. (5.12)
Грубым состояниям равновесия соответствуют все точки плоскости параметров , , лежащие вне оси =0 и полуоси =0, >0.
Точкам оси = 0 и полуоси = 0, >0 соответствуют негрубые состояния равновесия (негрубые особые точки). Их свойства могут быть изменены сколь угодно малыми изменениями правых частей уравнений (5.1) за счет сколь угодно малых изменений функций P(x,y), Q(x,y) и их производных. Поэтому характер негрубых состояний равновесия (в частности, устойчивость) уже не определяется значениями коэффициентов в правых частях уравнений первого приближения (5.8). В отличие от линейных систем, уже при небольших изменений в правых частях содержащихся там нелинейных членов может произойти качественное изменение фазового портрета — бифуркация.
Примеры