

Выбор регулирующий клапан
Пневматический регулирующий шаровой клапан Smart 787
Его используют для управления процессами во многих областях промышленности, как например, пищевая, металлургическая, химическая, нефтяная и т.д. Дроссельный клапан имеет новую конструкцию, благодаря чему он может работать с трехацентрическим и многостойким уплотнителем (рис. 2.5.1).
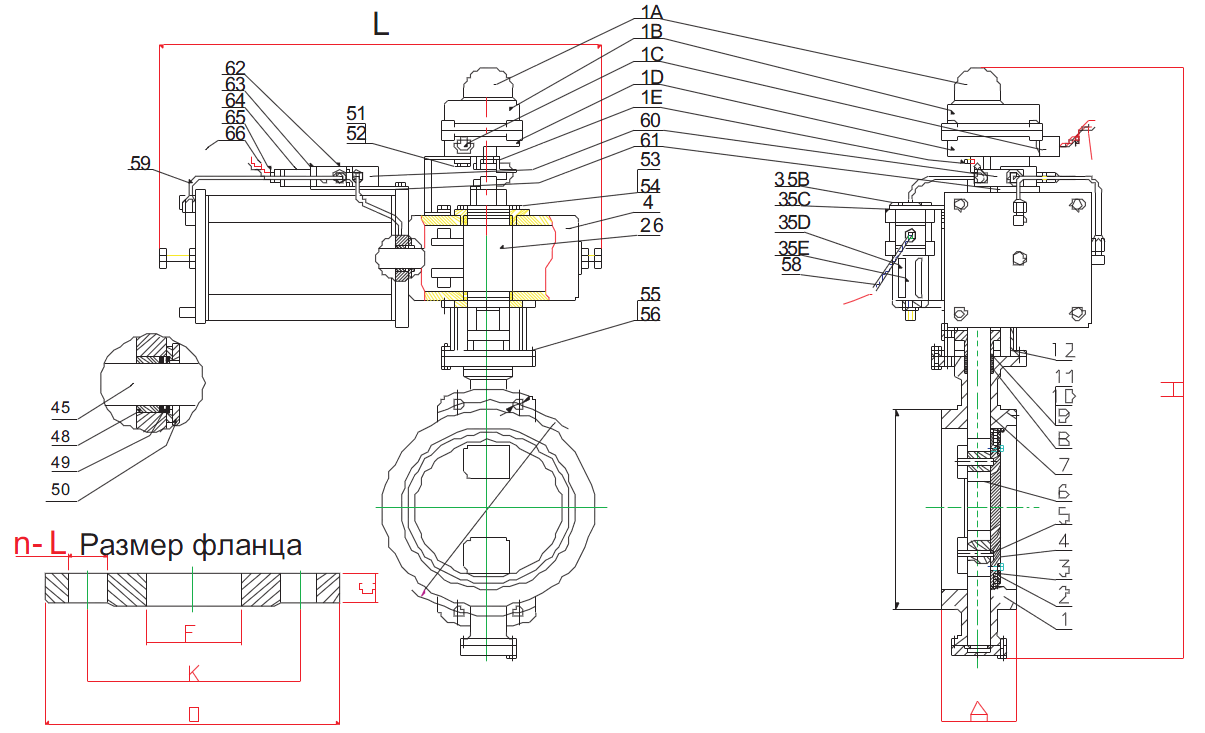
Рисунок 2.5.1 - Пневматический регулирующий шаровой клапан Smart 787
Служит для регулирования расхода и давления жидкости, азота, газа, пара, кислорода.
Отсечной дроссельный клапан состоит из пневматического исполнительного механизма, корпуса дроссельного клапана, электромагнитного клапана, воздушного фильтра, компонентов воздушного канала, соединительных и крепежных элементов и других компонентов.
Электромагнитный клапан позволяет изменять положение от «полностью открытого» до «полностью закрытого», а также поддержания заданного значения. Сигнал (например, 24 В постоянного тока, 220 В переменного тока) от устройства управления или от ручного регулятора поступает на электромагнитный клапан, который выдает сигнал в виде давления воздуха на ИМ, управляющий открывание - закрыванием через редуктор, приводящий в действие регулятор дроссельного клапана.
Технические характеристики:
Вход: 4-20 мА
Электропитание: 220 В АС, 50 Гц
Выход: 4-20 мА
Диапозон открытия 0 – 100%
Рабочая температура: -20 до +150°С
Максимальное давление 4 МПа
Клапан регулирующий проходной ARI-STEVI
Промышленные установки, технологии производственных процессов, строительство установок и оборудования и т. п
Принцип действия
Усилие от привода с помощью штока передается на затвор, состоящий из плунжера и седла. Плунжер перекрывает часть проходного сечения, что приводит к уменьшению расхода через клапан. Согласно закону Бернулли при этом увеличивается скорость потока среды, а статическое давление в трубе падает. При полном закрытии плунжер садится в седло, поток перекрывается, и, если затвор будет полностью герметичен, давление после клапана будет равно нулю.
Клапан регулирующий проходной ARI-STEVI представлен на рисунке 2.5.2
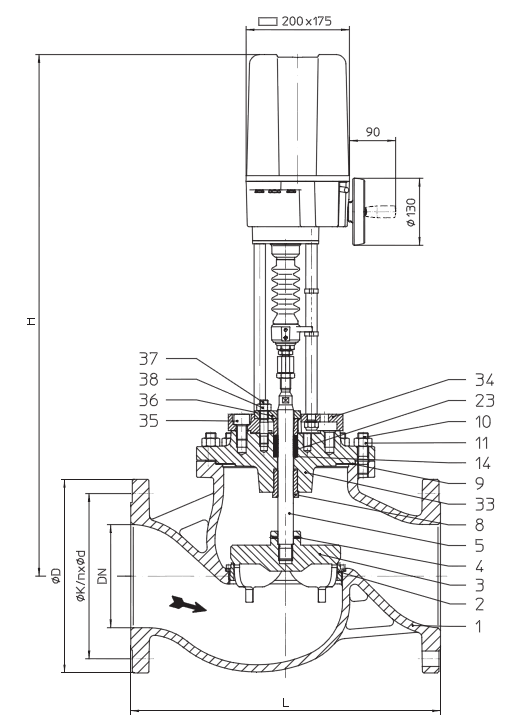
Рисунок 2.5.2 - Клапан регулирующий проходной ARI-STEVI
МЭО-90
Механизмы предназначены для перемещения регулирующих органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами, поступающими от регулирующих и управляющих устройств.
Механизм может применятся в различных отраслях народного хозяйства: в газовой, нефтяной, металлургической, пищевой промышленности, в жилищно-коммунальном хозяйстве и т.д.
МЭО-90 представлен на рисунке 2.5.3
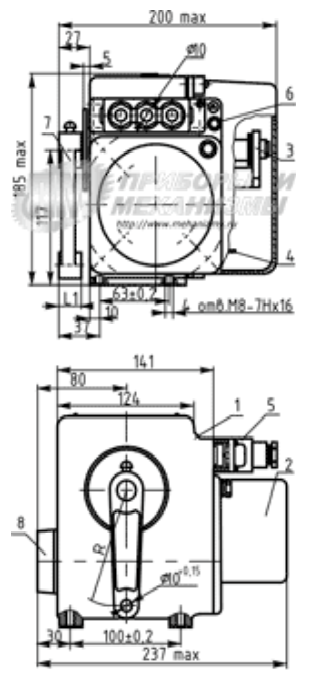
Рисунок 2.5.3 – МЭО-90
Технические характеристики
Электрическое питание механизма осуществляется однофазным напряжением: 220, 230, 240 В частотой 50 Гц и 220 В частотой 60 Гц.
Допускаемые отклонения напряжения питания от номинального значения от минус 15 до плюс 10% частоты — от минус 2 до плюс 2%.
Пусковой крутящий момент механизма при номинальном напряжении питания превышает номинальный момент не менее чем в 1,7 раза.
Выбег выходного вала механизма при номинальном напряжении питания без нагрузки не более:
1% полного хода выходного вала — для механизма с временем полного хода 8, 10 сек;
0,5% полного хода выходного вала — для механизма с временем полного хода 20, 25 сек;
0,25% полного хода выходного вала — для механизма с временем полного хода 50 сек и более.
Люфт выходного вала механизма не более 1°.
Механизм обеспечивает фиксацию положения выходного вала при отсутствии напряжения питания.
Вывод: преимущества Пневматического регулирующего шарового клапана Smart 787 в том, что дроссельный клапан имеет новую конструкцию, благодаря чему он может работать с трехацентрическим и многостойким уплотнителем, доступ к монтажу, простота и надежность конструкции.