

Выбор контроллера
Программирующий котроллер Simatic S7 400
SIMATIC S7-400 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации средней и высокой степени сложности. SIMATIC S7-400 (рис. 2.4.1) является универсальным контроллером. Он отвечает самым жестким требованиям промышленных стандартов, обладает высокой степенью электромагнитной совместимости, высокой стойкостью к ударным и вибрационным нагрузкам. Установка и замена модулей контроллера может производиться без отключения питания («горячая замена»). Модульная конструкция, работа с естественным охлаждением, гибкие возможности расширения, мощные коммуникационные возможности, простота создания распределенных систем управления и удобство обслуживания делают SIMATIC S7-400 идеальным средством для решения практически любой задачи автоматизации. Несколько типов центральных процессоров различной производительности и широкий спектр модулей с множеством встроенных функций существенно упрощают разработку систем автоматизации на основе SIMATIC S7-400. Если алгоритмы управления становятся более сложными и требуют применения дополнительного оборудования, контроллер позволяет легко нарастить свои возможности установкой дополнительного набора модулей.
Рисунок 2.4.1 - Программирующий котроллер Simatic S7 400
Сигнальные модули Siemens (SM) для ввода и вывода дискретных и аналоговых сигналов:
Модули ввода-вывода дискретных сигналов SIMATIC S7-400 обеспечивают возможность подключения к контроллеру датчиков и исполнительных устройств дискретного действия.
Модули позволяют:
- выполнять максимальную адаптацию системы ввода-вывода контроллера к требованиям решаемой задачи путем установки требуемого количества модулей ввода-вывода различных типов.
- обеспечиваеть высокую гибкость использования контроллера: за счет подключения к S7-400 большинства существующих дискретных датчиков и исполнительных устройств.
Модули ввода-вывода аналоговых сигналов для SIMATIC S7-400 обеспечивают возможность подключения к контроллеру аналоговых датчиков и исполнительных устройств.
Модули позволяют:
а) адаптировать контроллер к требованиям решаемой задачи по количеству и виду требуемых каналов ввода-вывода аналоговых сигналов;
б) производить подключение большинства существующих аналоговых датчиков и исполнительных устройств.
Программирующий котроллер плк 63 овен (плк63)
Контроллер ОВЕН ПЛК63 - это программируемый контроллер для простых задач автоматизации (рис.2.4.2). Основные области его применения – ЖКХ, ЦТП, ИТП, котельные, небольшие станки. Представляет собой удобную базу для создания законченных приборов.
Контроллер ПЛК63 не предназначен для автоматизации быстродействующего оборудования (станков с ЧПУ, быстродействующих автоматов, систем управления перемещением), т.к. входы и выходы контролера имеют недостаточно высокое быстродействие.
Логика работы ПЛК63 определяется потребителем в процессе программирования контроллера ПЛК63. Программирование осуществляется с помощью системы программирования CoDeSys версии 2.3.8.1 и выше.
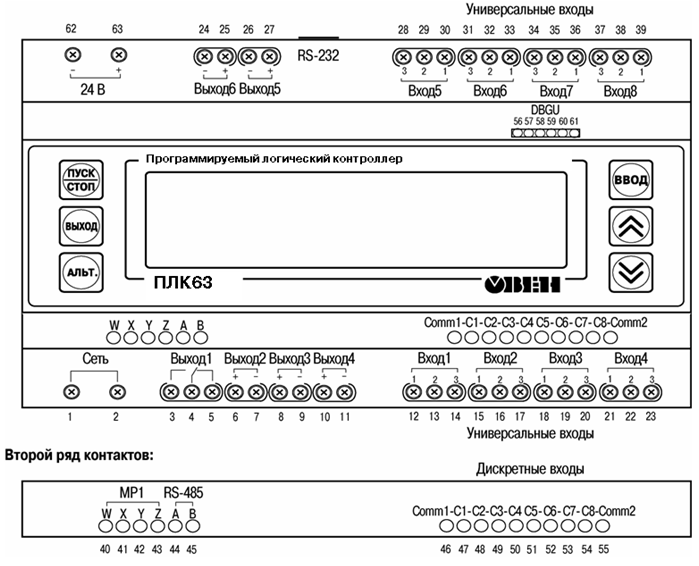
Рисунок 2.4.2 - Программирующий котроллер ПЛК 63 ОВЕН (ПЛК63)
Таблица 2.4.1Технические характеристики ПЛК63
Центральный процессор |
32x разрядный RISC процессор 18 МГц на базе ядра ARM7 |
Объем оперативной памяти |
64 кбайт |
Объем энергонезависимой памяти |
512 кбайт (Flash-память) |
Время работы часов реального времени после пропадания питания |
не менее 3 месяцев |
Конструктивное исполнение |
крепление на DIN-рейку |
Дисплей |
двухстрочный 16-символьный с подсветкой и русскоязычным меню |
Клавиатура |
пленочная, 6 кнопок |
Степень защиты корпуса |
IP20 |
Продолжение таблицы 2.4.1 |
|
Напряжение питания |
~220В 50Гц |
Напряжение встроенного источника |
Макс. ток источника питания 200мА |
|
|
Программирующий котроллер PLC SMH 2010 С
SMH 2010 С - это компактный, быстродействующий программируемый контроллер (ПК) (рис.2.4.3), предназначенный для операций управления в системах, требующих до 832 входов/выходов. Панельное исполнения контроллера позволяет использовать его одновременно и, как операторскую панель, устанавливаемую снаружи электротехнических шкафов, в соответствующие отверстия. Программное ядро, установленное на контроллере, позволяет при помощи специального инструментального пакета SMLogix, работающего под ОС семейства MS Windows, создавать пользовательские программы управления для контроллера на языке функциональных блоков (FBD).
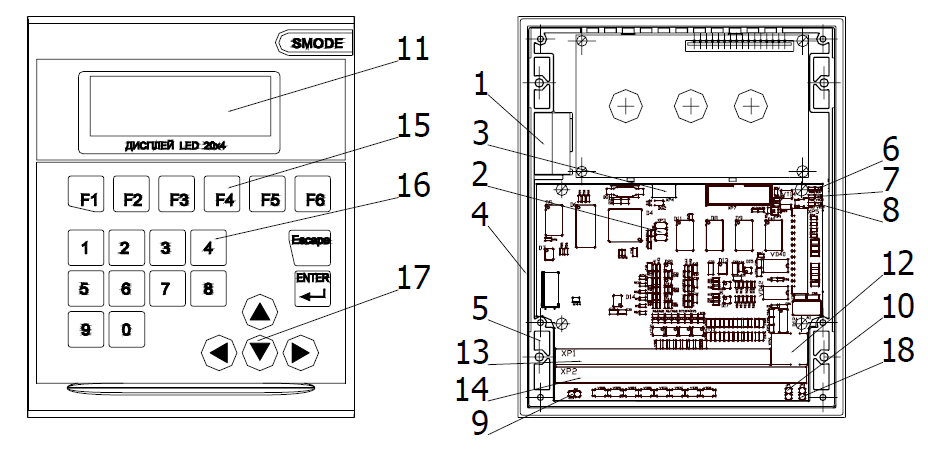
Рисунок 2.4.3 - Программирующий котроллер SMH 2010 С
Таблица 2.4.2 – Значение обозначений на рисунке 2.4.3
Поз. |
Элемент |
1 |
Место для установки батареи |
Продолжение таблицы 2.4.2 |
|
2 |
Разъем для программирования ХР3 |
3 |
Разьем для подключения батареи ХР4 |
4 |
Уплотняющая прокладка |
5 |
Место установки скобы для крепления контроллера на дверцу электротехнического щита |
6 |
Светодиод наличия питания |
7 |
Светодиод работы порта СОМ1 |
8 |
Светодиод работы порта СОМ2 |
9 |
Джампер JP2 (перемычка для подключения питания нагрузки от внутреннего выпрямителя) |
10 |
Джампер JP1 (перемычка для подключения в сеть терминатора порта СОМ1) |
11 |
Дисплей |
12 |
Разъем ХР6, порт СОМ2, тип RJ12 |
13 |
Клемный блок ХР1 |
14 |
Клемный блок ХР2 |
15 |
Функциональныые кнопки |
16 |
Цифровые кнопки |
17 |
Кнопки "стрелки" |
18 |
Джампер JP (перемычка для подключения в сеть терминатора порта СОМ2) |
Технические характеристики:
Дискретные выходы
Количество дискретных ыходов - 8
Тип дискретных выходов - Транзистор с открытым стоком
Максимальный ток нагрузки выходов - 1 А, 5 А, (импульс 300 мкс)
Напряжение выходной нагрузки - 50 В постоянный ток (макс.)
Дискретные входы
Количество дискретных входов (max) - 12
Уровень напряжения сигнала дискретных входов - Логический «0» - от 0 до 3.4 VDC, Логическая «1» - от 4.0 до 50 VDC
Частота по входам - 100 Гц
Аналоговые входы
Количество аналоговых входов - для термометров сопротивления (max) - 4 канала, для сигнала 0...10 В - 6 каналов, для сигнала 4...20 мА - 6 каналов
Разрешение аналоговых входов -10 бит
Аналоговые выходы
Количество аналоговых выходов (max) - 4 ( 0 – 10 в)
Разрешение аналоговых выходов - 10 бит
Нагрузочная способность аналогового выхода - 3 мА
Вывод: на производстве рациональнее использовать SIMATIC серии S7-400, так как он обладает необходимыми функциями для регулирования процесса, высокое быстродействие, возможность программирования на языках STL, FBD и LAD3-уровневая парольная защита программы пользователя, наличие конфигурируемых областей памяти для сохранения данных при перебоях в питании контроллера, универсальность входов и выходов центральных процессоров, Наличие съемных терминальных блоков для подключения внешних цепей, упрощающих выполнение операций монтажа и замены вышедших из строя модулей, наращивание количества обслуживаемых входов и выходов за счет модулей расширения и/или систем распределенного ввода-вывода на основе AS-Interface, поддержка протоколов PPI/ MPI/ USS/ MOD¬BUS, свободно программируемый порт, поддержка обработки рецептурных данных, возможность редактирования программы без перевода центрального процессора в режим STOP, использование страничной адресации блоков данных.