0.2. Обобщенные силы. Условие равновесия в обобщенных координатах
Рассмотрим
систему, имеющую ![]() степеней
свободы, на которую наложены стационарные
и голономные связи. Для
введения понятия обобщенной силы
рассмотрим сумму виртуальных работ
активных сил, действующих на точки
данной механической системы:
степеней
свободы, на которую наложены стационарные
и голономные связи. Для
введения понятия обобщенной силы
рассмотрим сумму виртуальных работ
активных сил, действующих на точки
данной механической системы:  . Для
систем со стационарными связями
радиус-вектор
. Для
систем со стационарными связями
радиус-вектор ![]() -й
точки есть
функция обобщенных координат:
-й
точки есть
функция обобщенных координат:  . Виртуальные
перемещения точек механической системы
найдем, пользуясь определением полного
дифференциала (главной части приращения
функции многих переменных)
. Виртуальные
перемещения точек механической системы
найдем, пользуясь определением полного
дифференциала (главной части приращения
функции многих переменных)  .
.
Подставляя данное выражение в формулу для выражения работы активных сил, находим:
 .
.
Величины  , стоящие
при соответствующих вариациях обобщенных
координат в формуле для вычисления
суммы виртуальных работ активных сил,
действующих на точки данной механической
системы, называютсяобобщенными
силами.
, стоящие
при соответствующих вариациях обобщенных
координат в формуле для вычисления
суммы виртуальных работ активных сил,
действующих на точки данной механической
системы, называютсяобобщенными
силами.
Размерность обобщенных сил определяется размерностью соответствующих обобщенных координат
 .
.
Способы вычисления обобщенных сил: Используя формулу для вычисления скалярного произведения через координаты перемножаемых векторов, обобщенную силу можно записать в виде
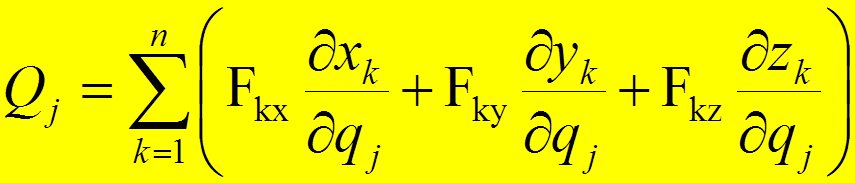 .
.
Это выражения в конкретных расчетах не используется, а применяется следующий способ.
Так как связи голономные, то вариации обобщенных координат независимы, и обобщенную силу можно найти, задавая изменение лишь одной координаты, а вариации остальных полагать равными нулю. Тогда, определяя виртуальную работу активных сил на изменении этой координаты, находим
 ,
,
 .
.
Если механическая система консервативная, то обобщенная сила равна частной производной от потенциальной энергии по соответствующей обобщенной координате, взятой со знаком минус
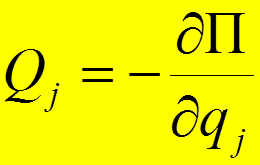 .
.
Действительно, силы, действующие на точки механической системы, в этом случае определяются равенствами:
 ,
,  ,
,  .
.
Их подстановка в формулы первого способа определения обобщенных сил дает
 .
.
В начало лекции
25 не весь
Условие равновесия в обобщенных координатах
Согласно
принципу виртуальных перемещений,
условие  является
необходимым и достаточным для равновесия
системы с идеальными и стационарными
связями. Переходя к обобщенным координатам,
находим
является
необходимым и достаточным для равновесия
системы с идеальными и стационарными
связями. Переходя к обобщенным координатам,
находим 
 .
.
Пусть связи, наложенные на систему, являются голономными. В силу независимости вариаций обобщенных координат равенство нулю возможно только в том случае, когда все коэффициенты при вариациях обобщенных координат равны нулю.
Для равновесия механической системы с идеальными, стационарными и голономными связями необходимо и достаточно, чтобы все обобщенные силы были равны нулю

Для консервативных механических систем необходимым и достаточным условием равновесия является система равенств:
Вычисление обобщённых сил
Если система имеет n степеней свободы, то у неё n обобщённых координат, независимых друг от друга (q1, q2, …, qn) и n возможных перемещений (δq1, δq2, …, δqn). Сумма элементарных работ, приложенных к системе сил, на возможные перемещения системы равна
![]() .
.
Обобщёнными силами называются коэффициенты, стоящие перед соответственными возможными перемещениями. Так как обобщённые координаты не зависят друг от друга, то для определения обобщённой силы системе необходимо сообщить возможные перемещения, соответствующие координатам, а все остальные возможные перемещения принять за нуль, то есть для определения Q1 необходимо, чтобы δq1 ≠ 0, δq2 = 0, δq3 = 0, …, δqn = 0, тогда
![]()
 .
.
Размерность обобщённых сил зависит от размерности обобщённых координат: если qj = x (м), то Qj – сила (Н); если qj = φ (рад), то Qj – момент (Н∙м).
26.
Вводится функция Лагранжа: L = T – П, тогда – уравнения Лагранжа второго рода для консервативной системы.
При стационарных связях (связях, не зависящих от времени) t не входит в выражение для кинетической энергии, тогда – квадратичная форма обобщенных скоростей, aij= aji – коэффициенты инерции. Квадратичная форма всегда положительна.
ВЕРНУТЬСЯ 6 Уравнения второго рода для консервативной системы
Предположим,
что на рассматриваемую механическую
систему наряду с силами, имеющими
потенциал (консервативными силами),
действуют силы, не имеющие потенциала
(неконсервативные силы). При этом условии
обобщенную силу ![]() удобно
представить в виде суммы обобщенной
силы
удобно
представить в виде суммы обобщенной
силы ![]() ,
соответствующей консервативным силам
,
соответствующей консервативным силам ![]() ,
и обобщенной силы
,
и обобщенной силы ![]() ,
соответствующей неконсервативным
силам
,
соответствующей неконсервативным
силам ![]() :
:
![]() =
+
.
=
+
.
Если на рассматриваемую систему действуют только консервативные силы, то обобщенная сила определяется формулой:
![]() =
= ![]() =
= (j=1,2,…,
s).
(j=1,2,…,
s).
В этом случае уравнения Лагранжа второго рода принимают следующий вид:

![]() =
= (j
= 1,2,…, s). (11)
(j
= 1,2,…, s). (11)
Уравнения (12) можно преобразовать путем введения функции Лагранжа L = Т – П, называемой кинетическим потенциалом.
![]()
П
= П (![]() t).
t).
Следовательно, кинетический потенциал L является функцией обобщенных координат, обобщенных скоростей и времени:
![]()
Потенциальная энергия является функцией только обобщенных координат и времени, а потому
 (j=1,2,…,
s).
(j=1,2,…,
s).
Пользуясь этим условием, получим
![]() ,
, 
Подставим эти частные производные в уравнения Лагранжа (11):
или
 (j=1,2,…,
s). (12)
(j=1,2,…,
s). (12)
Уравнения (12) называются уравнениями Лагранжа второго рода для консервативной с
27 не весь
Взаимодействие тел, при котором за малый промежуток времени скорости точек изменяются на конечную величину, называется ударом. Время удара измеряется сотыми, тысячными и менее долями секунды. Силы, возникающие при таком взаимодействии, называются ударными.
 или
или 
Основное уравнение теории удара. Изменение количества движения материальной точки за время удара равно сумме ударных импульсов, действующих на точку
![]() ,
(3.9.2)
,
(3.9.2)
где ![]() –
скорость материальной точки до удара,
–
скорость материальной точки до удара, ![]() –
скорость этой точки после удара,
–
скорость этой точки после удара, ![]() –
импульс ударных сил.
–
импульс ударных сил.
величина,
равная импульсу ударной силы F уд за
время удара t, наз. ударнымимпульсом