

В начало лекции
19.3. Принцип виртуальных перемещений
Для равновесия механической системы с идеальными и стационарными связями необходимо и достаточно, чтобы сумма виртуальных работ всех активных сил, приложенных к точкам системы, была равна нулю
 .
.
Доказательство
необходимости. Дано,
что механическая система находится в
равновесии и требуется доказать,
что  . Так
как система
находится в равновесии, то равнодействующая
активных сил
. Так
как система
находится в равновесии, то равнодействующая
активных сил ![]() и
равнодействующая сил реакций связей
и
равнодействующая сил реакций связей ![]() ,
приложенных в
,
приложенных в ![]() -й
точке системы, удовлетворяют условию
равновесия статики:
-й
точке системы, удовлетворяют условию
равновесия статики:
 ,
, ![]()
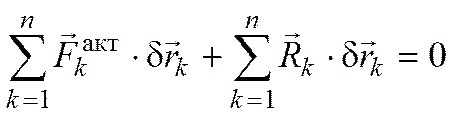
Сообщим
системе виртуальное перемещение и
умножим обе части каждого равенства
скалярно на соответствующее виртуальное
перемещение  .
Далее, суммируя полученные равенства,
находим:
.
Далее, суммируя полученные равенства,
находим:
 .
.
Так как связи идеальные, то
 .
.
Доказательство
достаточности. Пусть  ,
докажем, что механическая система
находится в равновесии. Предположим,
что при заданных условиях система не
находится в равновесии, т. е. при действии
на систему активных сил хотя бы одна
точка получила действительное
перемещение
,
докажем, что механическая система
находится в равновесии. Предположим,
что при заданных условиях система не
находится в равновесии, т. е. при действии
на систему активных сил хотя бы одна
точка получила действительное
перемещение ![]() и
и  .
.
Так
как для стационарных связей действительное
перемещение совпадает с одним из
возможных ( ),
то
),
то ![]() или
или  по
крайней мере для одной точки системы,
вышедшей из равновесия. Суммируя по
всем точкам системы, получаем
по
крайней мере для одной точки системы,
вышедшей из равновесия. Суммируя по
всем точкам системы, получаем  .
.
Так
как связи идеальные,
то 
 , что
противоречит условию.
, что
противоречит условию.
Следовательно, система находится в равновесии.
Принцип
виртуальных перемещений может быть
записан в иной форме, если поделить
уравнение, выражающее этот принцип на
временной интервал ![]() ,
в течение которого совершается это
перемещение.
,
в течение которого совершается это
перемещение.
Отношение  называется виртуальной
скоростью. Необходимое и достаточное
условие равновесия записывается в
виде
называется виртуальной
скоростью. Необходимое и достаточное
условие равновесия записывается в
виде  или
или  .
.
То есть, для равновесия механической системы с идеальными и стационарными связями необходимо и достаточно, чтобы сумма мощностей всех активных сил на виртуальных скоростях точек их приложения была равна нулю.
Принцип виртуальных перемещений можно применять для определения реакций связей в статически определимых конструкциях. Для этого надо освободить систему от одной из связей и реакцию этой связи считать активной силой. Система, лишенная одной связи, может получить виртуальное перемещение, что и позволяет найти неизвестную реакцию.
В начало лекции
Число независимых между собою возможных перемещений системы называетсячислом степеней свободы этой системы. Например. шар на плоскости может перемещаться в любом направлении, но любое его возможное перемещение может быть получено как геометрическая сумма двух перемещений вдоль двух взаимно перпендикулярных осей. Свободное твердое тело имеет 6 степеней свободы.
Общее
уравнение динамики ![]() –
при движении системы с идеальными
связями в каждый данный момент времен
сумма элементарных работ всех приложенных
активных сил и всех сил инерции на любом
возможном перемещении системы будет
равна нулю. Уравнение использует принцип
возможных перемещений и принцип Даламбера
и позволяет составить дифференциальные
уравнения движения любой механической
системы. Дает общий метод решения задач
динамики. Последовательность составления:
а) к каждому телу прикладывают действующие
на него задаваемые силы, а также условно
прикладывают силы и моменты пар сил
инерции; б) сообщают системе возможные
перемещения; в) составляют уравнения
принципа возможных перемещений, считая
систему находящейся в равновесии.
–
при движении системы с идеальными
связями в каждый данный момент времен
сумма элементарных работ всех приложенных
активных сил и всех сил инерции на любом
возможном перемещении системы будет
равна нулю. Уравнение использует принцип
возможных перемещений и принцип Даламбера
и позволяет составить дифференциальные
уравнения движения любой механической
системы. Дает общий метод решения задач
динамики. Последовательность составления:
а) к каждому телу прикладывают действующие
на него задаваемые силы, а также условно
прикладывают силы и моменты пар сил
инерции; б) сообщают системе возможные
перемещения; в) составляют уравнения
принципа возможных перемещений, считая
систему находящейся в равновесии.
23