

КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТВЕРДОГО ТЕЛА В РАЗНЫХ СЛУЧАЯХ ЕГО ДВИЖЕНИЯ |
||||||||
Поступательное Движение |
Вращательное Движение |
Плоское движение |
Общий случай движения |
|||||
|
|
|
|
|||||
Теорема Кенига. Кинетическая энергия твердого тела складывается из кинетической энергии поступательного движения вместе с центром масс и кинетической энергии в его вращательном движении вокруг центра масс. T=Tc+T’. |
||||||||
Теорема об изменении кинетической энергии механической системы Изменение кинетической энергии системы на некотором перемещении равно сумме работ всех внешних и внутренних сил, приложенных к системе на том же перемещении T-To=Ak(e)+Ak(i) |
||||||||
РАБОТА СИЛЫ |
||||||||
Элементарная работа равна скалярному произведению силы на вектор элементарного перемещения точки ее приложения
Полная работа:
|
|
Частные случаи вычисления работы |
||||||
1 |
F=const;=const; точка приложения силы движется по прямой |
A=Fs cos |
||||||
2 |
Сила направлена перемещению |
A=0 |
||||||
3 |
Сила F приложена к телу вращающемуся относительно оси z |
A=mz(F)d d-элементарный угол поворота mz(F)- момент силы F относительно оси z |
||||||
Уравнения Лагранжа 2 рода |
||||||||
s- число степеней свободы системы с голономными связями; T- кинетическая энергия системы;
Qi –обобщенные силы. |
Правило для вычисления обобщенных сил. Чтобы вычислить обобщенную силу Q1 необходимо:
3. Qi=Aq1/q1. |
|||||||
План решения задачи на составление уравнений Лагранжа 2 рода для механической системы.
|
||||||||




19
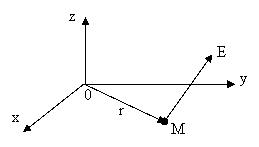
Потенциальное силовое поле.
Силовым полем называется область, в каждой точку которой, на помещённую в неё материальную точку действует сила однозначно определённая по величине и направлению в любой момент времени.
![]()
Силовое поле определяется уравнениями:
 .
.
Силовое поле называется не стационарным, если поле зависит явно от времени; истационарным, если не зависит от времени t явно.
Будем рассматривать только стационарные силовые поля.
Стационарное
силовое поле называется потенциальным,
когда существует однозначная скалярная
функция ![]() ,
зависящая только от координат точки
и такая, что проекция силы на декартовые
оси координат равны соответствующим
частным производным этой функции U:
,
зависящая только от координат точки
и такая, что проекция силы на декартовые
оси координат равны соответствующим
частным производным этой функции U:
Свойства потенциального поля.
1. Находим
dA – элементарную работу силы потенциального
силового поля.
 .
.
![]() -
элементарная работа силы потенциального
силового поля равного полному дифференциалу
силовой функции зависящую от координат.
-
элементарная работа силы потенциального
силового поля равного полному дифференциалу
силовой функции зависящую от координат.
2. Полная
работа силы потенциального силового
поля для некоторого перемещения.
 .
.
где U2 и U1 – значения силового поля в конечной и начальной точке.
Работа силы потенциального силового поля не зависит не от закона движения точки, не от формы траектории точки, а определяется только начальным и конечным положением точки, т.е. значениями силового поля в этих положениях.
3. Работа силы на замкнутой траектории равна 0.
Потенциальная энергия материальной точки.
1. Потенциальной энергией точки называется скалярная функция, равная значению функции взятой с обратным знаком.
 .
.
Предположим, что между двумя точками происходит перемещение из M (xyz) в М*(0). U = П = 0
Найдём работу силы на этом перемещении.
 .
.
Потенциальная энергия равна работе, которую может совершить сила поля при перемещении из данного положения в нулевую точку.
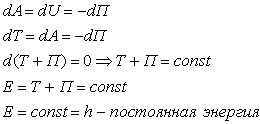
Закон сохранения полной механической энергии.
Полной механической энергией материальной точки называется сумма её кинетической E, и потенциальной энергии П, а полной Е = Т + П
При движении материальной точки в потенциальном силовом поле её полная энергия сохраняется постоянно. Предположим, что механические силы, действующие на материальную точку потенциальны, тогда элементарная работа равна dU или –dП.
20
Р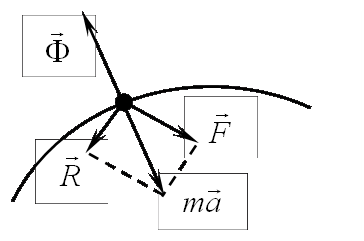 ассмотрим
движение материальной точки под действием
некоторых активных сил и сил реакций
связей. Введем
обозначения (рис. 17.1):
ассмотрим
движение материальной точки под действием
некоторых активных сил и сил реакций
связей. Введем
обозначения (рис. 17.1):  - равнодействующая
активных сил, приложенных к
точке,
- равнодействующая
активных сил, приложенных к
точке, ![]() - равнодействующая
реакций связей. Силой
инерции материальной
точки (обозначается
- равнодействующая
реакций связей. Силой
инерции материальной
точки (обозначается ![]() ) - называется
сила, равная по модулю произведению
массы точки на ее ускорение и направленная
в сторону противоположную ускорению.
То есть
) - называется
сила, равная по модулю произведению
массы точки на ее ускорение и направленная
в сторону противоположную ускорению.
То есть  . Реально
эта сила не приложена к материальной
точке, а есть равнодействующая сил, с
которыми данная точка действует на
взаимодействующие с ней тела.
. Реально
эта сила не приложена к материальной
точке, а есть равнодействующая сил, с
которыми данная точка действует на
взаимодействующие с ней тела.
Принцип Д’Аламбера для точки: Если в фиксированный момент движения, кроме действующих на точку сил, добавить силу инерции, то система сил будет уравновешенной.
Доказательство эквивалентности принципа второму закону Ньютона. Из основного уравнения динамики путем тождественных преобразований находим
 Þ
Þ  Þ
Þ  .
.
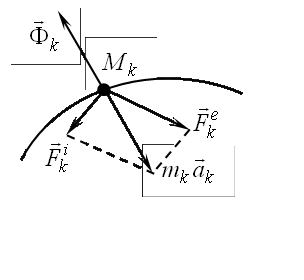
Принцип Д’Аламбера для механической системы. Если в фиксированный момент времени к каждой точке механической системы, кроме действующих сил, добавить силы инерции, то система сил будет уравновешенной.
Доказательство.
Силы, приложенные к каждой точке системы,
разделим на внешние
и внутренние. Тогда, принцип Д’Аламберадля
каждой точки (рис. 17.2) запишется в
виде  ,
, ![]() .
.
Принципу Д’Аламбера для механической системы можно придать другую математическую форму. Суммируя полученные выражения, находим
 ,
,
а
умножая векторно
слева на радиус-векторы ![]() точек
системы и снова выполняя суммирование
находим:
точек
системы и снова выполняя суммирование
находим:
 .
.
С учетом свойства внутренних сил имеем
 ,
,  ,
,
где  - главный
вектор внешних сил,
- главный
вектор внешних сил, ![]() - главный
вектор сил инерции.
- главный
вектор сил инерции.  - главный
момент внешних сил системы,
- главный
момент внешних сил системы, ![]() - главный
момент сил инерции.
- главный
момент сил инерции.
Полученные уравнения по форме совпадают с условиями равновесия статики. В общем случае они позволяют получить шесть скалярных равенств (равенства нулю сумм проекций сил, включая силы инерции, на каждую из координатных осей и равенства нулю сумм моментов сил относительно координатных осей).
Метод решения задач динамики, основанный на применении принципа Д'Аламбера, носит название метода кинетостатики.