

4.2. Параллельные порты
4.2.1. Параллельный порт вывода
Параллельный порт вывода, работающий в синхронном режиме, при реализации требует минимальных аппаратных затрат. На рис. 4.1 представлена функциональная схема такого порта. Порт включает в свой состав:
параллельный регистр DD1;
дешифратор адреса (номера) порта DD2;
формирователь сигнала записи в регистр DD3.
Р ис.
4.1. Функциональная схема синхронного
параллельного порта вывода
ис.
4.1. Функциональная схема синхронного
параллельного порта вывода
Разрядность регистра DD1 определяется разрядностью шины данных периферийного устройства. В регистре могут использоваться триггеры типа "защелка".
Д ешифратор адреса подключен к 8 младшим разрядам шины адреса. При наличии адреса порта (01h) и управляющего сигнала IOW на шине управления информация с шины данных МПС записывается в регистр и поступает на периферийное устройство.
4.2.2. Параллельный порт ввода
Параллельный порт ввода, работающий в синхронном режиме, имеет в своем составе те же функциональные узлы, что и порт вывода. Но поскольку выходы регистра должны подключаться к шине данных МПС, необходимо использовать регистр, выходы которого имеют Z-состояние или реализованы по схеме с открытым коллектором. На рис. 4.2. приведена функциональная схема параллельного синхронного порта ввода.
П ри наличии на шине адреса кода 02h и управляющего сигнала IOR, информация записывается в регистр DD1 и выдается на шину данных. Снятие сигнала IOR переводит выходы регистра DD1 в Z-состояние и шина данных МПС освобождается.
Р ис.
4.2. Функциональная схема синхронного
параллельного порта ввода
ис.
4.2. Функциональная схема синхронного
параллельного порта ввода
4.2.3. Параллельные порты ввода-вывода
В составе МПК имеются микросхемы, которые путем предварительного программирования могут быть настроены на ввод или вывод информации в параллельном коде в синхронном и асинхронном режимах. Примером микросхем данного типа может служить микросхема I8255 (КР580ВВ55) "Параллельный программируемый интерфейс" [АЛЕК84, ХВОЩ87].
Микросхема позволяет осуществить обмен 8-разрядными данными по трем каналам. Направление обмена и режимы работы для каждого канала задаются программно. Структурная схема I8255 представлена на рис. 4.3.
Р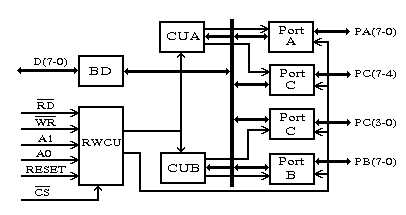 ис.
4.3. Структурная схема микросхемы I8255
"Программируемый параллельный
интерфейс
ис.
4.3. Структурная схема микросхемы I8255
"Программируемый параллельный
интерфейс
В состав микросхемы входят:
двунаправленный 8-разрядный буфер данных (BD), связывающий микросхему с системной шиной данных;
блок управления записью/чтением (RWCU), обеспечивающий управление передачей информации как внутри микросхемы, так и между микросхемой и внешними устройствами;
три 8-разрядных канала ввода/вывода (Port A, Port B, Port C) для обмена информацией с внешними устройствами;
схема управления группой А (CUA), вырабатывающая сигналы управления каналом A и старшими разрядами канала C (PC[7-4]);
схема управления группой B (CUB), вырабатывающая сигналы управления каналом B и младшими разрядами канала C (PC[3-0]).
О бмен информацией между шиной данных МПС и микросхемой осуществляется через двунаправленную шину D7-0 и буфер данных, при наличии определенных сигналов на адресных входах (A1,A0), сигнала чтения (RD), сигнала записи (WR) и сигнала выбора микросхемы (CS).
Доступ к каналу A обеспечивается при наличии на входах A1, A2 адреса 00b, к каналу B – адреса 01b, а к каналу C – адреса 10b.
Сигналом, подаваемым на вход RESET, все каналы устанавливаются в нулевое состояние и переводятся в режим ввода.
Перед началом работы необходимо запрограммировать интерфейс: задать для каждого канала направление передачи информации и режим работы. Это обеспечивается путем записи определенной кодовой комбинации в регистр управляющего слова (РУС), который на структурной схеме не показан. Регистр РУС имеет адрес 11b и доступен только для записи.
Микросхема позволяет реализовать три режима обмена информацией:
синхронный режим (Режим 0);
асинхронный (стробируемый) однонаправленный режим (Режим 1);
асинхронный двунаправленный режим (Режим 2).
Канал A может работать в любом из трех режимах, канал B – режимах 0 и 1. Канал С может быть использован для передачи данных только в режиме 0. Режим 0 задается для каналов C7–C4 и C3–C0 нулевым режимом той группы, в которую данный канал входит. В остальных режимах канал C используется для передачи и формирования управляющих сигналов, сопровождающих асинхронный обмен по каналам A и B. Каналы одновременно могут работать в различных режимах. При изменении режима канала все его разряды устанавливаются в нулевое состояние.
Структура управляющего слова обеспечивающего задание режимов работы каналов и направление передачи информации представлена на рис. 4.4.

Рис. 4.4. Структура управляющего слова обеспечивающего задание режимов работы каналов и направление передачи информации в микросхеме I8255
Р ежим 0 – основной режим работы интерфейса, используется при организации синхронного обмена информацией между микропроцессором и внешними устройствами. При выводе информации по сигналу WR, данные находящиеся на ШД, запоминаются в буферном регистре соответствующего канала и сразу же передаются на его выход. При вводе информации данные с каналов A,B,C записываются в буферные регистры этих каналов без стробирования и при поступлении сигнала RD информация выбранного канала передается на ШД.
Режим 1 – обеспечивает возможность организации однонаправленной асинхронной передачи информации по каналам A и B. Канал C(7-4), в этом случае, используется для приема и формирования трех управляющих сигналов сопровождающих асинхронный обмен по каналу A, а канал C(3-0) – трех управляющих сигналов сопровождающих асинхронный обмен по каналу B.
При асинхронном обмене информации используется работа микропроцессора в режиме прерывания.
Режим 2 – обеспечивает двунаправленный асинхронный обмен информации по каналу A. Процесс обмена сопровождают пять управляющих сигналов, подаваемых по линиям С(7-3) канала C.
Регистр управляющего слова позволяет также произвести установку или сброс отдельных разрядов канала С. Структура управляющего слова позволяющего реализовать это представлена на рис. 4.5.
В микроконтроллерах параллельные порты ввода-вывода реализованы на том же кристалле, что и процессор. Причем линии портов могут индивидуально настраиваться или на ввод, или на вывод информации.
Р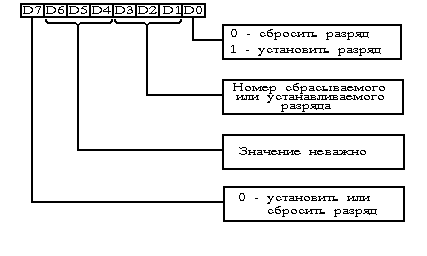 ис.
4.5. Структура управляющего слова
позволяющего произвести
установку
или сброс отдельных разрядов канала С
ис.
4.5. Структура управляющего слова
позволяющего произвести
установку
или сброс отдельных разрядов канала С