

2.7. Контроллер прямого доступа к памяти
Режим прямого доступа к памяти используется в МПС для быстрого обмена массивами данных между ЗУ и периферийным устройством. При работе в этом режиме МП отключается от шин адреса, данных и частично от шины управления, а функции работы с памятью и периферийным устройством берет на себя специальная ИМС контроллера прямого доступа к памяти (КПДП).
Основное назначение контроллера – формирование в процессе обмена между ЗУ и периферийным устройством последовательности адресов ЗУ, а также сигналов управления обменом и процессом прямого доступа к памяти.
КПДП может иметь несколько независимых каналов, связанных с отдельными источниками запроса на прямой доступ к памяти. Каждому из каналов присваивается определенный уровень приоритета. В КПДП может использоваться как фиксированный, так и циклический приоритет запросов прямого доступа к памяти. Каждый канал включает регистр адреса и регистр-счетчик. В регистр адреса заносится начальный адрес ЗУ для передаваемого массива данных. В регистр-счетчик помещается число, соответствующее длине передаваемого массива, а также информация о направлении передачи данных (из ЗУ в периферийное устройство или наоборот). Запись информации в регистр начального адреса и регистр-счетчик осуществляется микропроцессором и носит название инициализации КПДП. При наличии сигналов запроса от периферийных устройств на прямой доступ к памяти (DRQx) КПДП выдает сигнал запроса захвата HRQ, который поступает на вход HLD микропроцессора. При поступлении от МП сигнала подтверждения захвата HLDA КПДП формирует для периферийного устройства, запросившего прямой доступ к памяти и имеющего наивысший приоритет, сигнал подтверждения прямого доступа к памяти DACKx (direct-memory-access acknowledge). Получив доступ к памяти, контроллер выставляет на шину адреса адрес ЗУ, хранящийся в регистре адреса канала, и формирует, в зависимости от направления передачи информации, пару управляющих сигналов: “Чтение УВВ” – ”Запись ЗУ” или “Чтение ЗУ” – “Запись УВВ”. После записи или чтения одного слова, содержимое регистра адреса увеличивается на единицу, а содержимое регистра-счетчика уменьшается на единицу. Процедура будет повторяться до тех пор, пока содержимое регистра-счетчика регистра не станет равным нулю. В этом случае контроллер снимает сигнал подтверждения прямого доступа к памяти DACKx. В ответ на это периферийное устройство снимает сигнал запроса на прямой доступ к памяти DRQx с контроллера, а контроллер, в свою очередь, снимает сигнал запроса захвата с вывода HLD микропроцессора и процедура прямого доступа к памяти завершается.
Примером КПДП может служить микросхема I8257, которая имеет 4 независимых канала обмена, каждый из которых обеспечивает передачу блока данных размером до 16 Кбайт c произвольным начальным адресом в диапазоне от 0 до 64 Кбайт [АЛЕК84].
2.8. Программируемый таймер
Программируемый таймер предназначен для задания временных интервалов в МПС и может использоваться как счетчик внешних событий. Основу таймера составляет один или несколько счетчиков, работающих на вычитание либо на суммирование. МП имеет возможность предварительной записи числа в счетчик и чтения его содержимого в произвольный момент времени. В режиме таймера на вход счетчика поступают импульсы тактового генератора, в режиме счетчика внешних событий – внешний сигнал. При обнулении или переполнении счетчика на выходе таймера формируется сигнал, который может быть использован в качестве сигнала запроса прерывания.
Примером таймера может служить микросхема I8253 [АЛЕК84, ХВОЩ87]. В состав микросхемы входят три 16-разрядных счетчика, образующие три независимых канала, имеющих стробирующие входы. Каждый канал может работать в одном из 6 режимов, задаваемых программно:
таймера;
одновибратора;
двух режимах делителя частоты;
двух режимах формирователя строба.
Упрощенная структура одного канала, без учета схемы управления режимами его работы, имеет вид представленный на рис. 2.24.
Диаграммы, поясняющие работу канала в разных режимах, приведены на рис. 2.25–2.28. Счет во всех режимах происходит при наличии сигнала логической единицы на входе GATEx.
Режим 0 (режим таймера). После занесения числа Nx в счетчик на выходе OUTx устанавливается ”0”. По окончании счета на выходе OUTx появляется ”1”.
Режим 1 (режим ждущего мультивибратора). С момента появления ”1” на входе GATEx на выходе OUTx формируется отрицательный импульс длительностью t*Nx.
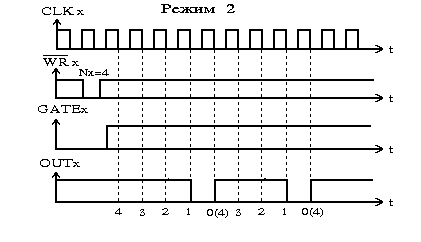
Режим 2 (режим делителя частоты). На выходе OUTx генерируется периодический сигнал c частотой в Nx раз меньше тактовой и длительностью t.
Режим 3 (режим делителя частоты). На выходе OUTx генерируется периодический сигнал c частотой в Nx раз меньше тактовой и длительностью t*Nx/2.
Режим 4 (режим формирователя строба). На выходе OUTx через время t*Nx после появления ”1” на входе GATEx формируется отрицательный импульс длительностью t. При исчезновении ”1” на входе GATEx счет задержки приостанавливается до ее восстановления.
Р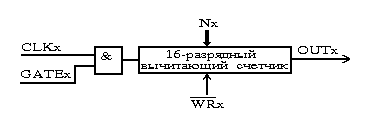 ежим
5
(режим формирователя строба). На выходе
OUTx через время t*Nx
после появления ”1” на входе GATEx
формируется отрицательный импульс
длительностью t. При исчезновении”1”
на входе GATEx счет задержки прекращается
и начинается сначала после восстановления”1”
на входе GATEx.
ежим
5
(режим формирователя строба). На выходе
OUTx через время t*Nx
после появления ”1” на входе GATEx
формируется отрицательный импульс
длительностью t. При исчезновении”1”
на входе GATEx счет задержки прекращается
и начинается сначала после восстановления”1”
на входе GATEx.
Рис. 2.24. Упрощенная структура одного канала таймера I8253
Р ис.
2.25. Временные диаграммы работы таймера
I8253 в 0 и 1 режимах
ис.
2.25. Временные диаграммы работы таймера
I8253 в 0 и 1 режимах
Р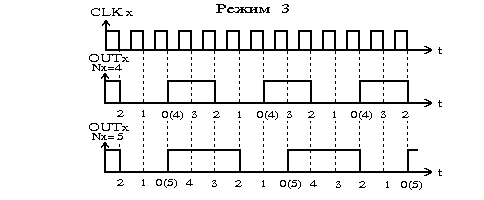
 ис.
2.26. Временные диаграммы работы таймера
I8253 во 2 режиме
ис.
2.26. Временные диаграммы работы таймера
I8253 во 2 режиме
Рис. 2.27. Временные диаграммы работы таймера I8253 в 3 режиме
Р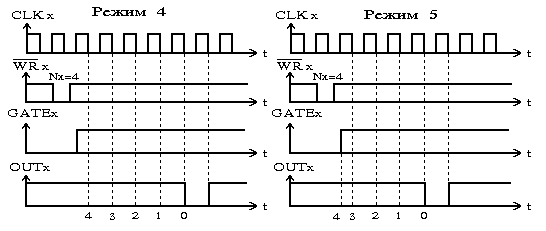 ис.
2.28. Временные диаграммы работы таймера
I8253 в 4 и 5 режимах
ис.
2.28. Временные диаграммы работы таймера
I8253 в 4 и 5 режимах