

2.4. Системный контроллер
Системный контроллер предназначен для формирования сигналов управления памятью, УВВ и другими устройствами, входящими в состав МПС.
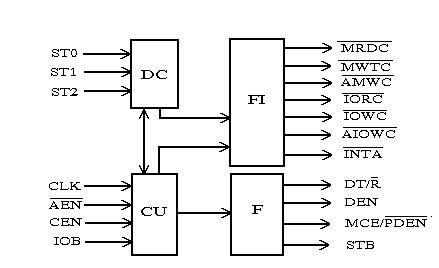
На рис. 2.20 приведена структурная схема системного контроллера I8288, который носит название "Контроллер шин" [ХВОЩ87]. Контроллер используется совместно с микропроцессором Intel 8086 при его работе в режиме максимальной конфигурации.
Р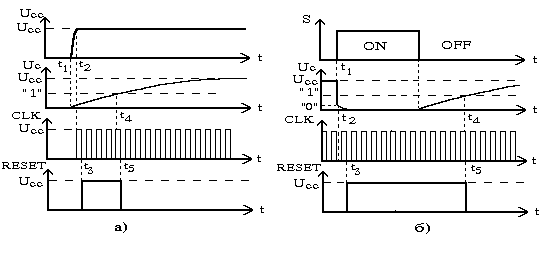 ис.
2.19. Временные диаграммы формирования
сигнала RESET:
ис.
2.19. Временные диаграммы формирования
сигнала RESET:
а) при включении питания; б) при нажатии кнопки S
Контроллер включает в себя:
дешифратор состояния (DC);
схему управления (CU);
формирователь командных сигналов (FI);
ф
 ормирователь
управляющих сигналов (F).
ормирователь
управляющих сигналов (F).
Рис. 2.20. Структурная схема контроллера шин I8288
Контроллер обеспечивает, в соответствии с выполняемым МП машинным циклом, формирование командных сигналов:
ч
 тения
из памяти MRDC;
тения
из памяти MRDC;з
 аписи
в память MWTC, AMWC;
аписи
в память MWTC, AMWC;ч
 тения
из УВВ IORC;
тения
из УВВ IORC;з

 аписи
в УВВ IOWC, AIOWC;
аписи
в УВВ IOWC, AIOWC;п
 одтверждения
прерывания INTA.
одтверждения
прерывания INTA.
С игналы AMWC и AIOWC называются сигналами записи с упреждением поскольку формируются на такт раньше соответственно сигналов MWTC и IOWC.
Контроллер обеспечивает формирование также управляющих сигналов:
D
 T/R
– задающего направление передачи
информации через приемопередатчики
(”1” при записи и “0” при чтении);
T/R
– задающего направление передачи
информации через приемопередатчики
(”1” при записи и “0” при чтении);DEN – разрешения передачи данных, используемый для отпирания приемопередатчиков;
M
 CE/PDEN
– выполняющего две функции: при входном
сигнале IOB=0 сигнал MCE служит для считывания
адреса из имеющего наивысший приоритет
контроллера прерываний, а при IOB=1 сигнал
PDEN разрешает работу приемопередатчиков
канала данных в процессе ввода-вывода;
CE/PDEN
– выполняющего две функции: при входном
сигнале IOB=0 сигнал MCE служит для считывания
адреса из имеющего наивысший приоритет
контроллера прерываний, а при IOB=1 сигнал
PDEN разрешает работу приемопередатчиков
канала данных в процессе ввода-вывода;STB – сигнала стробирования адреса.
Командные сигналы и сигналы управления формируются с помощью логических элементов, которые реализуют определенные логические функции. В качестве аргументов используются выходные сигналы МП и сигналы, поступающие от других устройств МПС.
Входными сигналами для контроллера являются:
сигналы состояния микропроцессора ST0, ST1, ST2;
сигнал от генератора тактовых импульсов CLK;
с
 игнал
разрешения адресации AEN, открывающий
командные выходы при AEN=0 и переводящий
их в высокоимпедансное состояние при
AEN=1;
игнал
разрешения адресации AEN, открывающий
командные выходы при AEN=0 и переводящий
их в высокоимпедансное состояние при
AEN=1;сигнал разрешения команды CEN, открывающий командные выходы и управляющие выходы DEN и PDEN при CEN=1 и переводящий их в пассивное состояние при CEN=0;
сигнал режима управления каналом IOB; при IOB=1 устанавливается режим управления каналом ввода-вывода, а при IOB=0 – режим управления системным каналом.
При работе МП INTEL 8086 в режиме минимальной конфигурации необходимые командные и управляющие сигналы формируются непосредственно на выводах микропроцессора.
В современных микроконтроллерах системный контроллер реализуется на том же кристалле, что и процессор. В этом случае, на выходах микроконтроллера имеются управляющие сигналы, которые и образуют шину управления.
2.5. Согласующие элементы микропроцессорных систем
При создании МПС обычно приходится подключать к шинам МП значительное количество самых разнообразных устройств. Такое подключение сопряжено с необходимостью разрешения следующих проблем:
шины адреса, данных и управления МП допускают потребление относительно небольшого тока подключенными к ним устройствами, т. е. обладают невысокой нагрузочной способностью;
в ряде случаев, например, при прямом доступе к памяти, требуется отключение устройств, не участвующих в этом процессе, в том числе и самого МП от шин МПС, что обеспечивается переводом выходов таких устройств в высокоимпедансное состояние (Z-состояние). Возможность временного отключения от шин выгодно использовать и для снижения нагрузки на шинах, организовав МПС так, что в каждый конкретный момент к шинам подключены лишь необходимые для данной операции микросхемы, а выходы остальных находятся в Z-состоянии. Однако не все микросхемы, подключаемые к шинам МПС, обладают возможностью перевода своих выходов в Z-состояние;
логика совместной работы МП и ряда устройств МПС предполагает буферизацию (временное хранение) определенной информации, что многими устройствами непосредственно не обеспечивается;
некоторые устройства МПС рассчитаны на прием и выдачу информации в инверсном коде, что требует соответствующего преобразования при ее передаче.
Решение всех этих проблем в МПС обычно возлагается на согласующие микросхемы, к которым относятся шинные формирователи и буферные регистры.