

Создание программы\подпрограммы
Как создать имя программы\подпрограммы
Выполните следующую последовательность действий.
Н ажмите
на пульте управления SELECT
F2
(CREATE)
ажмите
на пульте управления SELECT
F2
(CREATE)
В результате появиться окно написания программы (Рис.1.).
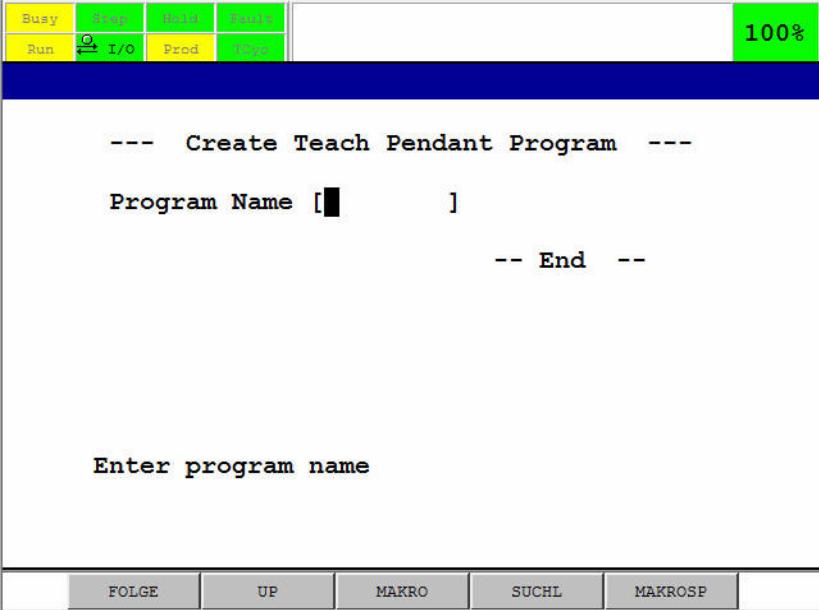
Рис.1. Окно написания программы.
Если нажать одну из функциональных клавиш F1 – F5 соответственно сможем ввести тип и имя одной из возможных программ\подпрограмм, которые можно создать:
F1 - FOLGE – основная исполнительная программа
F2 – UP - подпрограмма – не может быть запущена самостоятельно
F3 – MAKRO – макрос – подпрограмма - не может быть запущена самостоятельно, не могут быть использованы инструкции перемещения.
F4 – SUCHL
F5 - MAKROSP.
Действия для FOLGE, UP, MAKRO, SUCHLи MAKROSP аналогичны.
Например, если нажать F1 - FOLGE то в имени программы появиться тип создаваемой программы (Рис.2.).

Рис.2. Окно введения типа программы.
Рассмотрим примеры правильных\неправильных имен программ:
Правильные имена программ:
FOLGE001, FOLGE999, UP001, UP999.
Неправильные имена программ:
FOLGEA, FOLGEA1, FOLGE1A
Замечание: Если использованы другие имена программ, появится сообщение об ошибке:
„TPIF-038 invalid Char in Prog.name“
Затем в меню Alpha input (Рис.3.) выбрать:

Рис.3. Окно Alpha input
uppercase (заглавные символы),
lowercase(строчные символы).
И с помощью клавиш F1 – F5 набрать комментарий.
Набрать цифры можно непосредственно набирая на клавиатуре.
Если нажать Options, то появиться клавиатура (Рис.4.)

Рис.4. Клавиатура.
На которой можно непосредственно ввести имя программы.
Введем, например 002 и нажмем ENTER. В результате введем имя программы FOLGE002, как показано на Рис.3.
Затем нажать ENTER,ввести имя программы и снова нажать ENTER.
Логические инструкции, используемые в программировании
Примеры:
Логические операторы (левая часть = (правая часть))
(&) |
Логическое & (AND) для правой и левой частей |
(+) |
Логический + (OR) для правой и левой частей |
! |
Логическое NOT для правой части |
Операторы сравнения:
= |
<> |
< |
> |
>= |
<= |
Приоритеты:
Высокий
Низкий |
! |
*, /, DIV, MOD |
|
+ , - |
|
<, >, <=, >= |
|
=, <> |
|
(&) |
|
(+) |

Арифметические операторы:
+ |
Сложение |
- |
Вычитание |
* |
Умножение |
/ |
Деление |
DIV |
Остаток от деления |
MOD |
Целочисленное деление |
Нажмите F4 (CHOICE) [ ... ] и выберите необходимую инструкцию в верхнем окне:
Как видно на следующем скриншоте, вы можете запустить следующие функции, используя функциональные клавиши:
F1(Вставить) [ ... ]
F2 (Удалить) [ ... ]
F4 (Выбрать) [ ... ]
F5 (!) [ ... ] (Отрицание)

Инструкции перемещения робота
Состав стандартной инструкция перемещения
Способ перемещения
точка
Скорость перемещения
Тип окончательной обработки
Параметры движения

Способ перемещения .
Этот параметр определяет, каким образом робот переместиться в заданную точку.
С

Кусочная - Joint
(от точки к точке)

Линейная - Linear
(прямолинейное перемещение)

Круговая -Circular
(перемещение по окружности)
Joint
Когда задан такой способ перемещения, траектория перемещения робота рассчитывается таким образом, чтобы достичь заданной точки с максимальной скоростью.
При этом:
все координаты робота начинают и заканчивают движение одновременно.
Ориентация инструмента во время движения изменяется.
Joint - перемещение программируется, как перемещение в заданную точку.
Скорость перемещения задается в процентах или секундах.
В программе инструкция перемещения с параметром Joint выглядит следующим образом:
 J
P [1] 100% FINE
J
P [1] 100% FINE
Joint % или С
Реальная скорость перемещения зависит от координаты, которая движется медленнее всех остальных.
Linear
При таком способе перемещения, робот перемещает центр инструмента (ТСР) из исходной точки в заданную по прямолинейной траектории, привязываясь к ……….
Прямолинейное перемещение программируется, как перемещение в заданную точку.
Скорость задается в мм/с, см/мин, дюйм/мин, % или в секундах.
В программе инструкции перемещения с параметром Linear выглядит следующим образом:
L P[1] 100мм/с FINE
Linear
Circular.
Робот перемещает центр инструмента из исходной точки в заданную по круговой траектории через промежуточную точку.
Перемещение по окружности программируется, как перемещение в заданную точку через промежуточную.
Скорость задается в мм/с, см/мин /мин.
В программе инструкция перемещения с параметром Circular выглядит следующим образом:
С P[1]
P[2] 100 мм/с FINE
Первая точка в примере P [1] является промежуточной точкой.
Если необходимо запрограммировать перемещение по дуге, начинать следует с задания промежуточной точки, так что текущая позиция робота обучается как промежуточная. Вторым шагом для запрограммированной точки определяется способ перемещения, как перемещение по окружности и обучается вторая точка, в примере это P[2], в которую следует перемещаться по дуге.
Если необходимо запрограммировать перемещение по замкнутой окружности, следует задать два дуговых перемещения.
Окончание перемещения
Заданием этого параметра определяется, каким образом робот заканчивает перемещение.
Существует два способа окончания перемещения - Fine и CNT.
FINE.
При установке данного параметра робот в заданной точке останавливается.
CNT.
При установке данного параметра робот приближается к заданной точке, но не останавливается, а продолжает движение к следующей точке.
Изменяя аргумент параметра в пределах 0 – 100, можно задавать разное торможение и расстояние подхода робота к точке.

Примечание. Если после инструкции, содержащей параметр CNT, исполнить программную команду (например WAIT), робот все же остановиться в конечной точке.
Создание программы типа folge.
Введение текста программы.
Первым шагом необходимо выбрать системы координат в которых будет работать программа. Для этого с помощью клавиши NEXT перемещаемся по функциональному меню и нажимаем F1(INST). Появляется меню инструкций Instruments.В меню инструкций выбираем Offset/Frames и нажимаем ENTER.
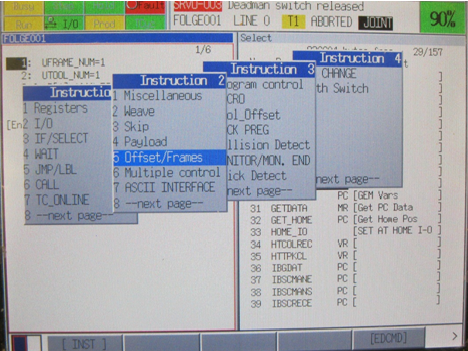
В окне Offset/Frames выбираем необходимый тип координатной системы (Например , UFRAME_NUM=…) и нажимаем ENTER.

Для выбора номера координатной системы выбираем CONSTANTи записываем необходимый номер(номер UFRAMEдолжен совпадать с номером ранее созданной системы координат ,в который мы собираемся работать) с помощью цифрового табло.

Аналогично выбираем следующую систему координат (Например, UTOOL_NUM=…) и повторяем действия.(номер UTOOLдолжен совпадать с ранее настроенным номером инструмента)


Теперь создадим траекторию перемещения манипулятора по точкам.
Для создания первой точки,в окне программы нажимаем F1(POINT) (если над клавишей F1 вместо POINTстоит INST,то необходимо нажать NEXT ,после чего над F1появиться POINT). Появляется окно выбора типа точки (Например,JP [ ] 100% FINE) и нажимаем ENTER.
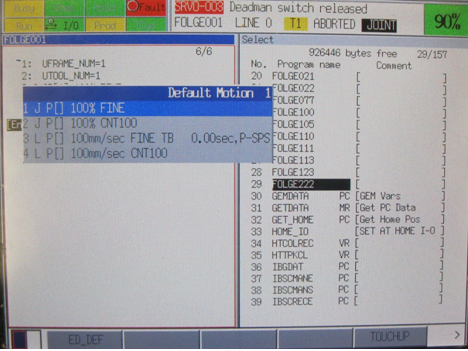
Эта точка будет иметь те координаты ,в которых сейчас находиться манипулятор. Чтобы посмотреть текущие координаты точки необходимо навести курсор на индекс точки ,заключённый в квадратных скобках [ ] и нажать F5(POSITION).Тип точки ,а также координаты в поле POSITIONможно полностью редактировать.Если необходимо отредактировать положение точки ,перемещаем в нужное положение манипулятор и нажимаем SHIFT+F5(TOUCHUP).
Для создания второй точки необходимо переместить манипулятор в положение , определяющее её. Затем нажать F1(POINT) и выбрать тип точки.
Последующие точки определяются аналогично.
Для запуска программы необходимо сначала осуществить сброс. Для этого необходимо нажать FCTN , выбрать USERCancelнажать ENTER.Откроется список программ ,выбираем созданную нами программу и нажимаем ENTER.Для её запуска нажимаем SHIFT+FWDи продолжаем удерживать SHIFT.(Команда SHIFT+FWDобрабатывает логику,SHIFT+RWDвозвращается по точкам не обрабатывая логику)
Программа копирования точки из системы USER1 в систему USER2.
FOLGE 020
:UFRAME_NUM=1 -настроенная пользователем система USER1.
:UTOOL_NUM=4 -настроенная пользователем система TCP 4
:
:JP[1] 100% FINE –домашняя точка
:LPR[5] 100% FINE–переносимая точка ,записана с помощью позиционного регистра в данный момент в системе USER1
:LP[2] 100mm/sFINE– точка отвода
:JP[3] 100% FINE – домашняя точка
:
:UFRAME_NUM=2 -настроенная пользователем система USER2.
:UTOOL_NUM=4-настроенная пользователем система TCP
:LPR[5] 100% FINE-переносимая точка ,записана с помощью позиционного регистра в данный момент уже в системе USER2
END


USER2
HOME po
Точка отвода

USER11
PR[5]
PR[5]5}
Позиционный регистр PR[5] находясь в системе USER1 хранит в себе координаты точки,при переходе в USER2 он перезаписывает их в новой системе.
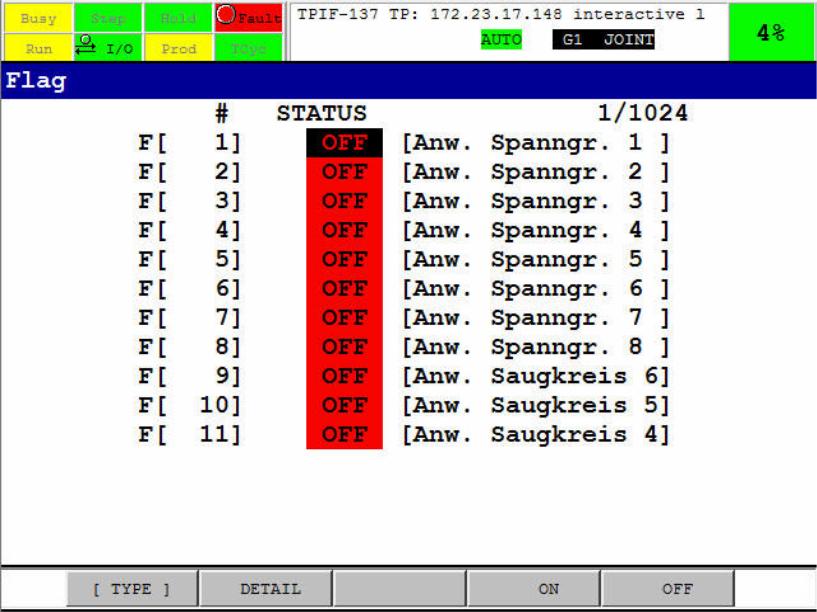
Маркер/флаг и TC_ONLINE
Чтобы отобразить маркер/флаг и TC_ONLINE,
Выполните следующую последовательность действий
MENU [ ... ],I/O [ ... ], F1(TYPE) [ ...]
и выберите Marker/Flag [ ... ] или TC_ONLINE [ ... ].
Следующие скриншоты отображают статус:.
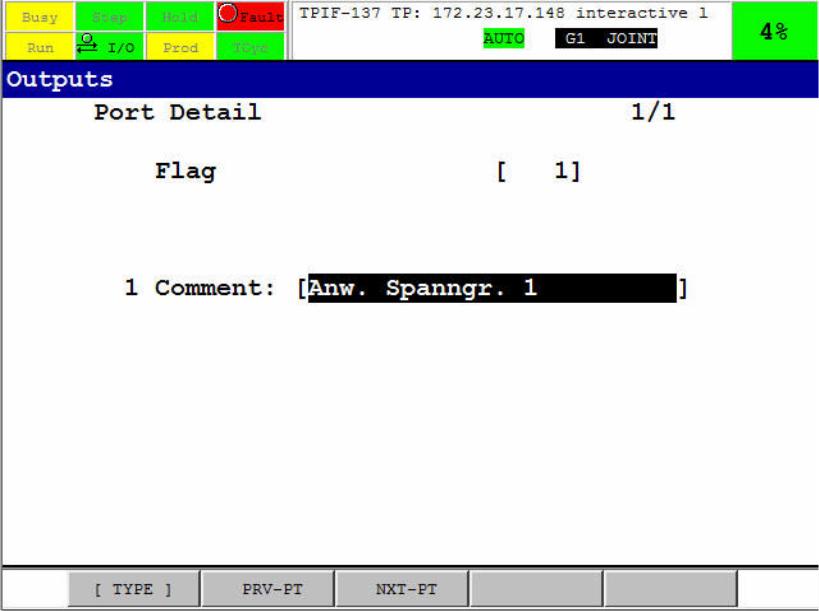
Flag
Detail
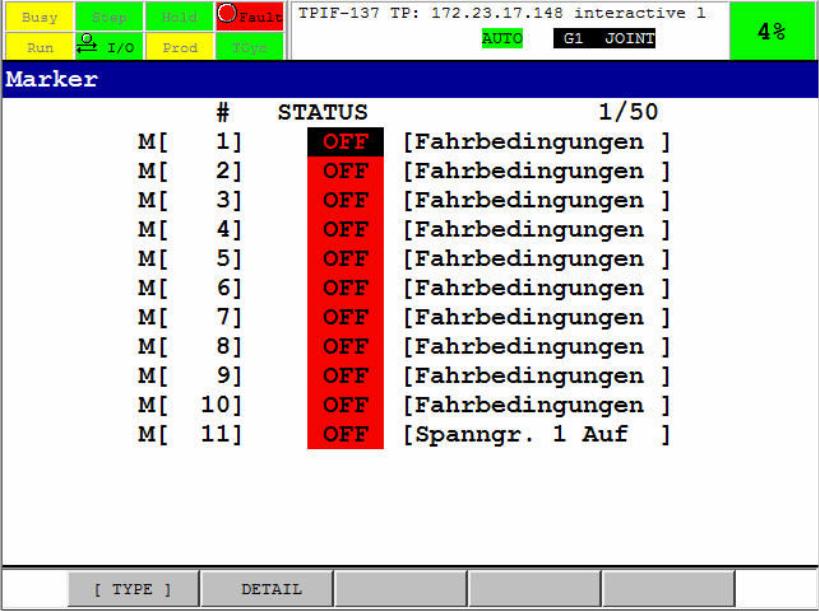
Marker
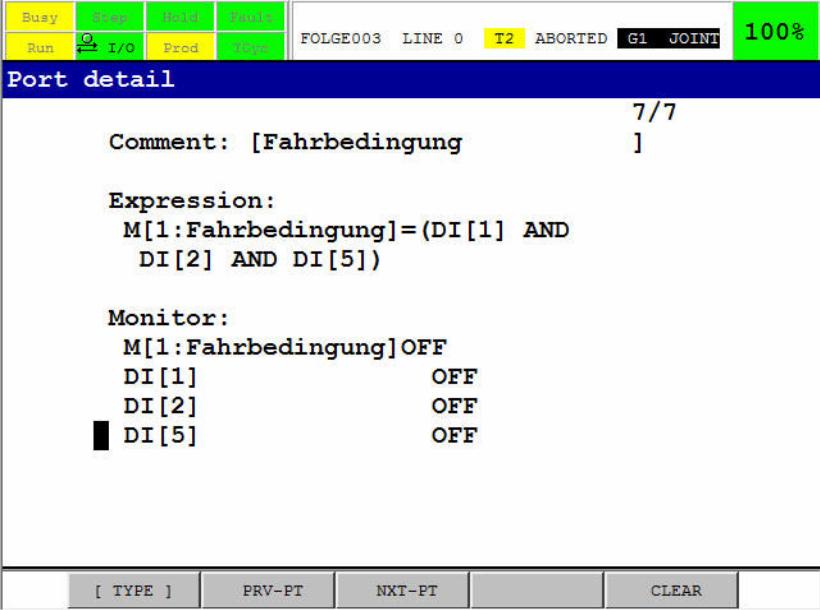
Detail
TC_ONLINE

Функция перемещения.
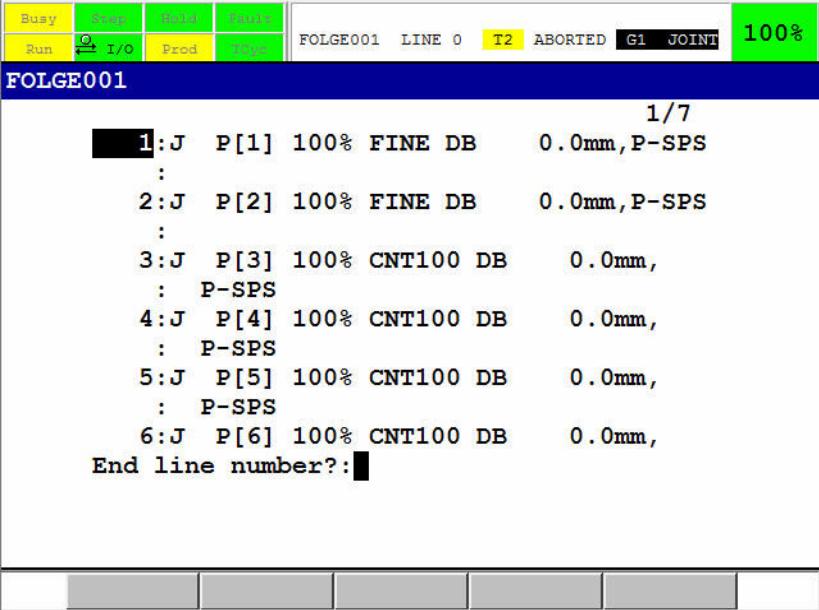
Нажмите F5 ([EDCMD]) [ ... ], отобразится выпадающее меню.

Выберите Replace [ ... ]. „"End line number ? :" [ ... ] отобразится.

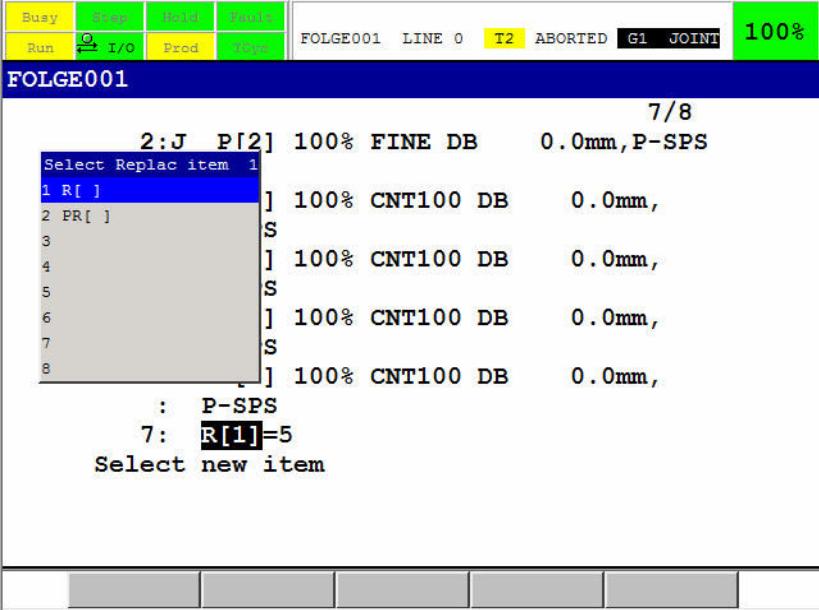
“Select old Item” [ ... ] отобразилось. Выберите старый элемент для изменения.

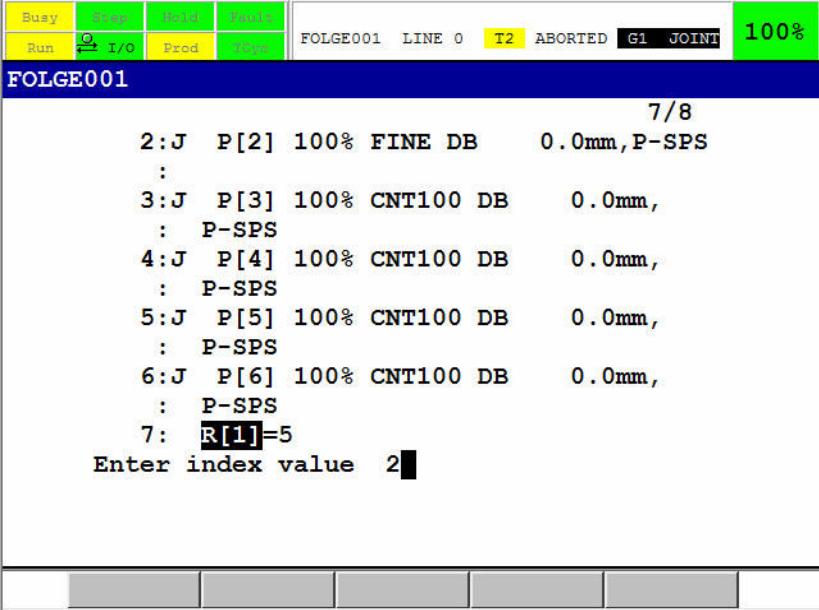
После ввода старого и нового элементов поисковый процесс чнется с текущего положения курсора.



После нажатия F2 ([ALL]) [ ... ], начнется перемещение между текущей и конечной строкой.
Если функция поиска использована в конечной программе, будут включены P-SPS программы.