

Преобразование в 3-мерном пространстве Элементы аналитической геометрии
Проекцией точки на координатную ось
называется точка пересечения плоскости,
проходящей через заданную точку и
параллельной плоскости, образованной
двумя другими осями координат. Например,
на рис. проекцией точки
![]() на ось
на ось
![]() является точка
является точка
![]() ,
которая принадлежит плоскости,
параллельной плоскости
,
которая принадлежит плоскости,
параллельной плоскости
![]() .
.
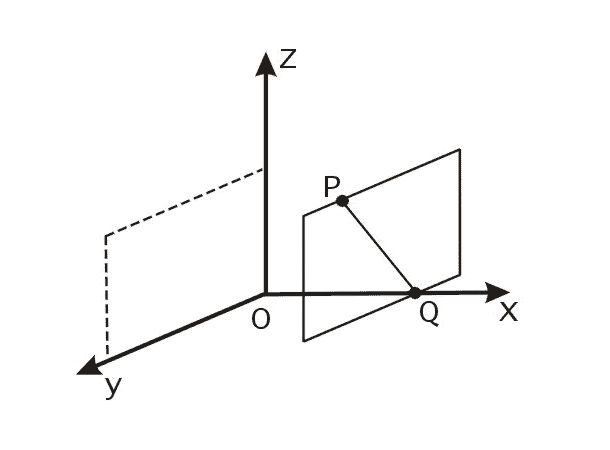
Рис. . Нахождение координаты
![]() точки P.
точки P.
Таким образом, положение в пространстве
точки
описывается ее координатами, что
записывается как
![]() .
Взаимное расположение осей в ортогональной
системе координат в трехмерном
пространстве может быть двух видов
.
Взаимное расположение осей в ортогональной
системе координат в трехмерном
пространстве может быть двух видов
Трехмерные матричные преобразования
Подобно тому, как двумерные преобразования
описываются матрицами размером
![]() ,
трехмерные преобразования могут быть
представлены матрицами размером
,
трехмерные преобразования могут быть
представлены матрицами размером
![]() .
Тогда трехмерная точка в трехмерном
пространстве P(x,
y, z)
представится четырехмерным вектором
[x y z
1] или [X Y Z
W]. Преобразования из
однородных координат описываются
соотношениями:
.
Тогда трехмерная точка в трехмерном
пространстве P(x,
y, z)
представится четырехмерным вектором
[x y z
1] или [X Y Z
W]. Преобразования из
однородных координат описываются
соотношениями:
[X Y Z W]=[x y z 1]*Т и [x' y' z' 1]=[X/W Y/W Z/W 1], где Т- некоторая матрица преобразования. Обобщенная матрица преобразования 4х4 для трехмерных координат имеет вид
Эта матрица может быть представлена в виде четырех отдельных частей:
![]()
Любое аффинное преобразование в трехмерном пространстве может быть представлено в виде суперпозиции вращений, масштабирований, отражений и переносов. Поэтому вполне уместно сначала подробно описать матрицы именно этих преобразований (ясно, что в данном случае порядок матриц должен быть равен четырем).
Матрица переноса имеет вид:
Матрица масштабирования относительно центра координат имеет вид:
Ранее рассмотренная для двумерного случая матрица поворота является в то же время трехмерным поворотом вокруг оси Z. Так как при трехмерном повороте вокруг оси Z (поворот в плоскости XY) размеры вдоль оси Z неизменны, то все элементы третьей строки и третьего столбца равны 0, кроме диагонального, равного 1:
вокруг оси У
вокруг оси Х

Композиция трёхмерных преобразований

Пример 3D преобразований
Этапы
- перенос Р1 в начало координат,
- поворот вокруг оси У, т.е. чтобы Р1Р2 переместилась в плоскость 0УZ,
- поворот вокруг оси Х , чтобы . чтобы Р1Р2 совместилась с осью Z.

Шаг 2. Поворот вокруг оси OY таким образом, чтобы поместилась в плоскость OYZ
Преобразование как изменение системы координат
Мы рассматривали преобразование множества точек, принадлежащих объекту, в некоторое множество точек, причем оба этих множества описаны в одной и той же системе координат – осуществляется преобразование объекта до желаемого результата.
Другой возможный эквивалентный способ преобразования является смена системы координат. Это полезно когда собирается большое число объектов, описанных в своих локальных системах координат (ЛК).

Рис.
Ранее мы считали, что символы определены в МК, и с помощью преобразований приводили их к новым позициям и ориентациям в той же системе МК -
МК=>МК (рис. ).
В более общем подходе размещение графических объектов можно рассматривать как переход от точек, заданных в локальной системе координат объекта, к соответствующим позициям в системе МК координат, путем преобразования координат ЛК => МК (рис. ).