

Способы регулирования частоты вращения асинхронного двигателя
Из выражения для угловой частоты вращения АД:
![]() (1.1)
(1.1)
следует, что существует три способа регулирования скорости:
- изменением числа пар полюсов p;
- изменением скольжения S;
- изменением
частоты питающей сети
![]() .
.
Для регулирования скорости изменением числа пар полюсов используются специальные многоскоростные АД с короткозамкнутым ротором. Изменение числа пар полюсов достигается за счет коммутации составных частей обмотки статора. Зная характер нагрузки, можно выбрать такую схему включения обмоток, которая обеспечит требуемые скорость и максимальный момент АД. Нижний предел диапазона регулирования составляет обычно 500 об/мин. Количество пар полюсов может быть равно только целому числу, поэтому данный способ регулирования скорости является ступенчатым. С энергетической точки зрения способ является экономичным, однако необходимость секционирования обмоток ухудшает массогабаритные показатели и повышает стоимость самого двигателя.
Регулирование
скорости изменением скольжения
предполагает изменение жесткости
механической характеристики АД при
неизменной частоте
![]() .
Для АД с короткозамкнутым ротором этот
способ реализуется изменением величины
напряжения, подводимого к двигателю.
.
Для АД с короткозамкнутым ротором этот
способ реализуется изменением величины
напряжения, подводимого к двигателю.
Н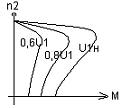 а
рисунке 1.1
приведены механические характеристики
АД при регулировании напряжения, которые
наглядно иллюстрируют особенности
данного способа. Регулирование скорости
осуществляется вниз от синхронной
скорости
а
рисунке 1.1
приведены механические характеристики
АД при регулировании напряжения, которые
наглядно иллюстрируют особенности
данного способа. Регулирование скорости
осуществляется вниз от синхронной
скорости
![]() ,
при этом растет скольжение, существенно
снижаются максимальный момент и
перегрузочная способность АД. Кроме
того, с ростом скольжения пропорционально
растут потери в цепи ротора. Поэтому
применение данного способа ограничивается
электроприводом малой мощности с
небольшим диапазоном регулирования.
Частотное регулирование АД осуществляют
изменением частоты напряжения подводимого
к статору. Этот способ обеспечивает
плавное регулирование скорости в широком
диапазоне с хорошими энергетическими
характеристиками. Возможность
регулирования темпа изменения частоты
позволяет обеспечить оптимальные режимы
частотного пуска и торможения АД.
,
при этом растет скольжение, существенно
снижаются максимальный момент и
перегрузочная способность АД. Кроме
того, с ростом скольжения пропорционально
растут потери в цепи ротора. Поэтому
применение данного способа ограничивается
электроприводом малой мощности с
небольшим диапазоном регулирования.
Частотное регулирование АД осуществляют
изменением частоты напряжения подводимого
к статору. Этот способ обеспечивает
плавное регулирование скорости в широком
диапазоне с хорошими энергетическими
характеристиками. Возможность
регулирования темпа изменения частоты
позволяет обеспечить оптимальные режимы
частотного пуска и торможения АД.
Технически частотное регулирование осуществляют посредством полупроводниковых преобразователей частоты (ПЧ) — устройств, преобразующих однофазное или трехфазное сетевое напряжение с частотой 50 Гц в переменное трехфазное напряжение с регулируемой частотой и величиной напряжения.
Частотное управление асинхронным двигателем
Для анализа установившихся процессов в АД при переменной частоте используют схему замещения, приведенную на рис. 6.1 :
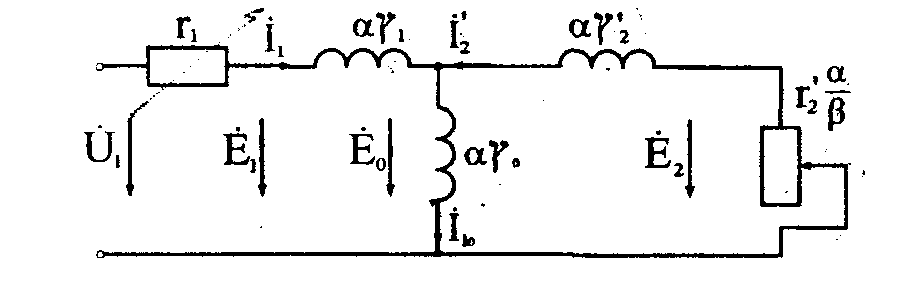
Рис. 6.1. Схема замещения АД при переменной частоте.
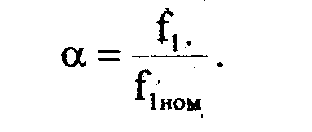
В этой схеме индуктивные сопротивления являются функцией относительной
частоты:
Степень нагрузки АД характеризуется абсолютным скольжением:
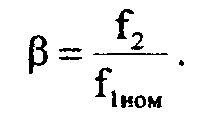
Введение этой величины связано с тем, что при переменной частоте скольжение S уже не определяет однозначно нагрузку АД, являясь еще и функцией частоты .
Учитывая,
что
![]() ,
получаем связь между
и S
:
,
получаем связь между
и S
:

Абсолютное
скольжение
в теории АД при переменной частоте
играет ту же роль,
что и относительное скольжение S
при постоянной
частоте, т.е. характеризует
момент двигателя. Если пренебречь
сопротивлением обмотки статора
![]() ,
то
однозначно определяет момент АД при
любой частоте.
,
то
однозначно определяет момент АД при
любой частоте.
Относительная
угловая частота вращения АД
![]() связана
с
связана
с
![]() и
соотношением
и
соотношением ![]() .
.
Частотное управление асинхронным двигателем по закону U/f=const
Простейший способ
частотного управления заключается в
изменении величины напряжения, подводимого
к АД, пропорционально частоте:

Данный закон не учитывает изменения нагрузки АД и, следовательно, может быть реализован в разомкнутой системе электропривода.
Уравнения,
описывающие процессы в АД при
![]() имеют вид
имеют вид
![]() ,
,

По полученным
в результате решения уравнений значениям
токов
![]() могут
быть определены момент, угловая частота
вращения, поток и другие величины,
характеризующие работу двигателя.
могут
быть определены момент, угловая частота
вращения, поток и другие величины,
характеризующие работу двигателя.
Механические характеристики АД для режима частотного управления
приведены на рис.
6.2 а, б. Отсюда видно, что уменьшение
частоты приводит к уменьшению максимального
момента АД. Это объясняется возрастающим
влиянием падения напряжения на активном
сопротивлении статора,
что приводит
к уменьшению э.д.с.
![]() ,
а значит - к уменьшению магнитного потока
двигателя. Падение магнитного потока
при данной частоте тем больше, чем больше
абсолютное скольжение, т.е. нагрузка АД
(рис. 6.3).
,
а значит - к уменьшению магнитного потока
двигателя. Падение магнитного потока
при данной частоте тем больше, чем больше
абсолютное скольжение, т.е. нагрузка АД
(рис. 6.3).


а) б)
Рис. 6.2. Механические характеристики АД при управлении по закону .

Рис. 6.3. Зависимость
потока от частоты при
![]()
Кроме того, с уменьшением частоты снижается жесткость механических характеристик, что, в конечном итоге, приводит к уменьшению активной составляющей тока ротора. Значительное снижение перегрузочной способности АД не позволяет использовать закон при частотах менее
25-30 Гц в электроприводах
с постоянным моментом нагрузки. Для
расширения диапазона регулирования
необходимо при уменьшении частоты
увеличивать отношение
![]() ,
чтобы поддерживать постоянным поток.
На рис. 6.4, а приведена вольтчастотная
характеристика, рассчитанная таким
образом, чтобы максимальный момент АД
при уменьшении частоты оставался равным
номинальному максимальному моменту
(рис. 6.4, б).
,
чтобы поддерживать постоянным поток.
На рис. 6.4, а приведена вольтчастотная
характеристика, рассчитанная таким
образом, чтобы максимальный момент АД
при уменьшении частоты оставался равным
номинальному максимальному моменту
(рис. 6.4, б).
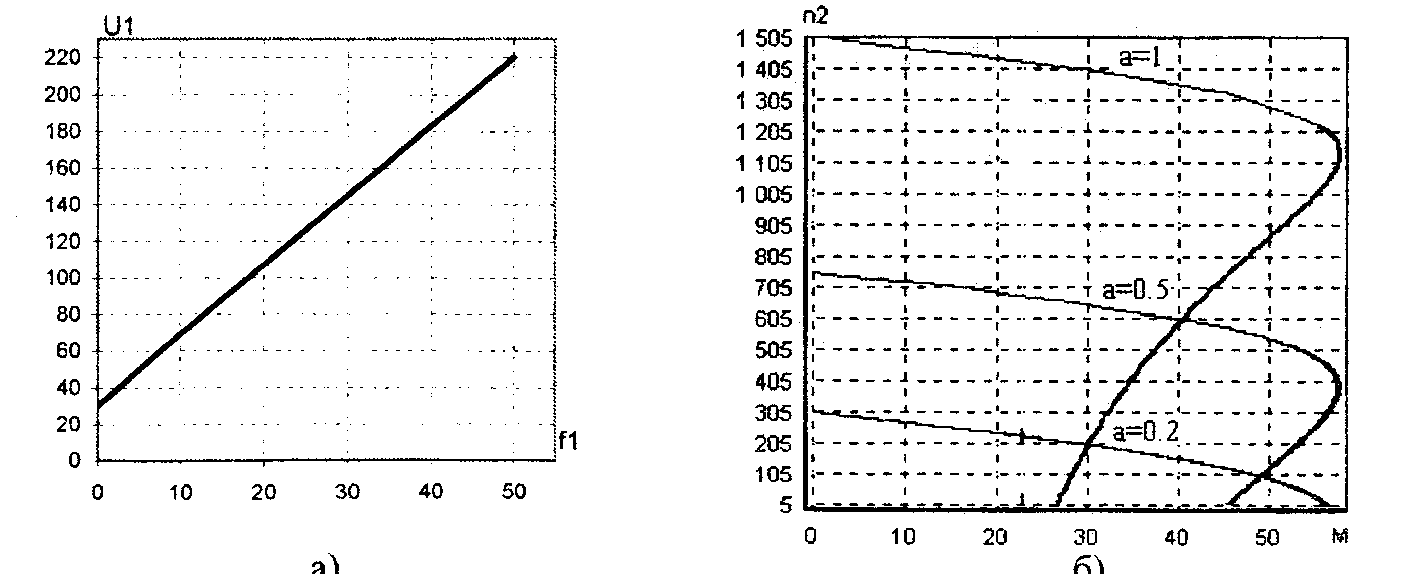
Рис. 6.4. Вольтчастотная
характеристика с повышенным отношением
![]() (а) и соответствующие ей механические
характеристики АД (б).
(а) и соответствующие ей механические
характеристики АД (б).
Применение ВЧХ с повышенным значением позволяет значительно расширить диапазон регулирования за счет увеличения максимального момента АД на низких частотах. Недостатком данного способа является возрастание магнитного потока на низких частотах при малых нагрузках (рис. 6.5, а). В режиме близком к холостому ходу ток двигателя соизмерим с номинальным током (рис. 6.5, б), при этом магнитопровод АД оказывается сильно насыщенным, соответственно возрастают потери.
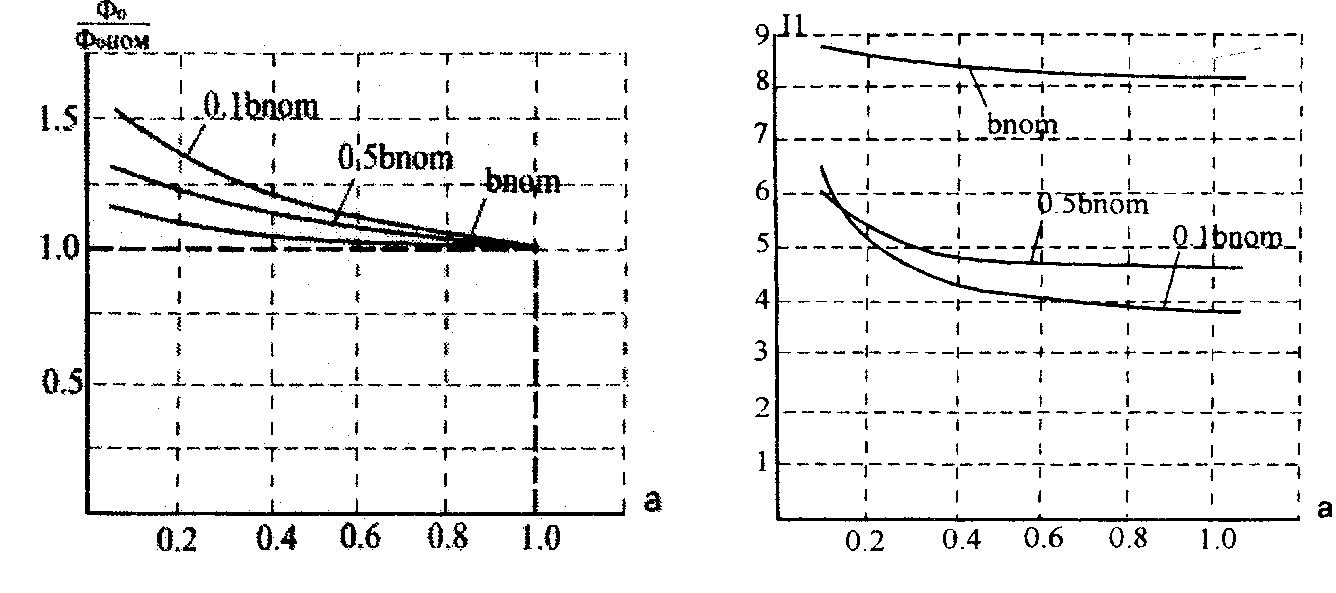
Рис. 6.5. Зависимость потока (а) и тока двигателя (б) от частоты при использовании ВЧХ с повышенным значением .
Тем не менее, такой подход широко используется на практике. Если заранее известен характер нагрузки, можно подобрать такую ВЧХ, которая обеспечит не только устойчивую, но и экономичную работу двигателя.