Конструкция и принцип действия асинхронного двигателя
Асинхронная машина – это машина переменного тока, у которой в установившемся режиме магнитное поле, участвующее в основном процессе преобразования энергии, и ротор вращаются с разными угловыми скоростями.
Статор – это полый цилиндр на внутренней поверхности которой в пазах размещается три фазные обмотки оси которых сдвинуты в пространстве на120, каждая фаза состоит из нескольких катушек. Число катушек определяет число пар полюсов. Существуют: а) короткозамкнутый ротор – это цилиндрическая клетка из медных или алюминиевых стержней которые вставлены в пазы цилиндрического сердечника собранного из пластин электротехнической стали, б) фазный ротор – имеет трехфазную обмотку с тежи ми пар полюсами что и статор, концы обмоток выводят контактные кольца вращающиеся в месте свалом.

Принцип действия
На статоре АД расположена трехфазная семеричная обмотка, оси фаз которой смещены в пространстве на 120, обмотка статора подключена к трехфазной симметричной системе напряжения, по обмоткам фаз протекают синусоидальные токи сдвинутые во времени на 120. В результате образуется вращающееся магнитное поле частота вращения которого n1=60f/p.Трехфазная короткозамкнутая обмотка ротора выполняется в виде клетки. Во вращающейся обмотке ротора, индуцируется ЭДС под действием которой в обмотке фаз ротора протекают токи. На проводник стоком в магнитном поле действует электромагнитные силы. Совокупность этих сил создает электромагнитный момент, который увлекает ротор за вращающимся полем.
n1 - частота вращения магнитного поля, f – частота напряжения сети, p – число пар полюсов в машине. При промышленной частоте f = 50 Гц частота вращения магнитного поля определяется как n1 = 3000/р
![]()
S - cскольжение – это относительная разность частот вращения или угловых скоростей магнитного поля и ротора, n2 – частота вращения ротора,
![]() и
и
![]()
![]() -
угловые скорости вращения магнитного
поля и ротора. Допущения: магнитное
поле, создаваемое обмоткой статора -
чисто синусоидальное.
-
угловые скорости вращения магнитного
поля и ротора. Допущения: магнитное
поле, создаваемое обмоткой статора -
чисто синусоидальное.
Закон электромагнитной индукции: Е=-dФ/dt
Закон Ампера Fa=B*I*L*sinα
Схема замещения и векторная диаграмма асинхронного двигателя
Уравнениям напряжения и токов соответствует схема замещения АД.

Рис. 1. Рис.2.
r1 – отражает электрические потери в первичной обмотке ω1
r2 – отражает электрические потери во вторичной обмотке ω2
rм – отражает потери в стали
х1 – отражает потери рассеяния магнитного поля ω1
х2 – отражает потери рассеяния магнитного поля ω2
хм – сопротивление взаимной индукции
На рис.1 изображена Т-образная схема замещения. Магнитная связь обмоток статора и ротора в АД заменена электрической связью цепей статора и ротора. Активное сопротивление R2’(1-S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. В этом случае АД аналогичен трансформатору, работающему на активную нагрузку. Сопротивление R2’(1-S)/S- единственный переменный параметр схемы. Значение этого сопротивления определяется скольжением, а, следовательно, нагрузкой на валу. Более удобна для практического применения Г-образная схема (рис.2), у которой намагничивающий контур(Zm=Rm+jXm) вынесен на входные зажимы. Чтобы не изменился намагничивающий ток, в контур последовательно включают сопротивления обмотки статора R1 и Х1. Полученная схема удобна тем, что состоит из двух параллельно соединенных контуров: намагничивающего с током Io и рабочего с током I2’. Расчет параметров рабочего контура схемы замещения требует уточнения, что достигается введением в расчетные формулы коэффициента С1, представляющего собой отношение напряжения сети U1к ЭДС статора Е1 при идеальном холостом ходе (S=0).
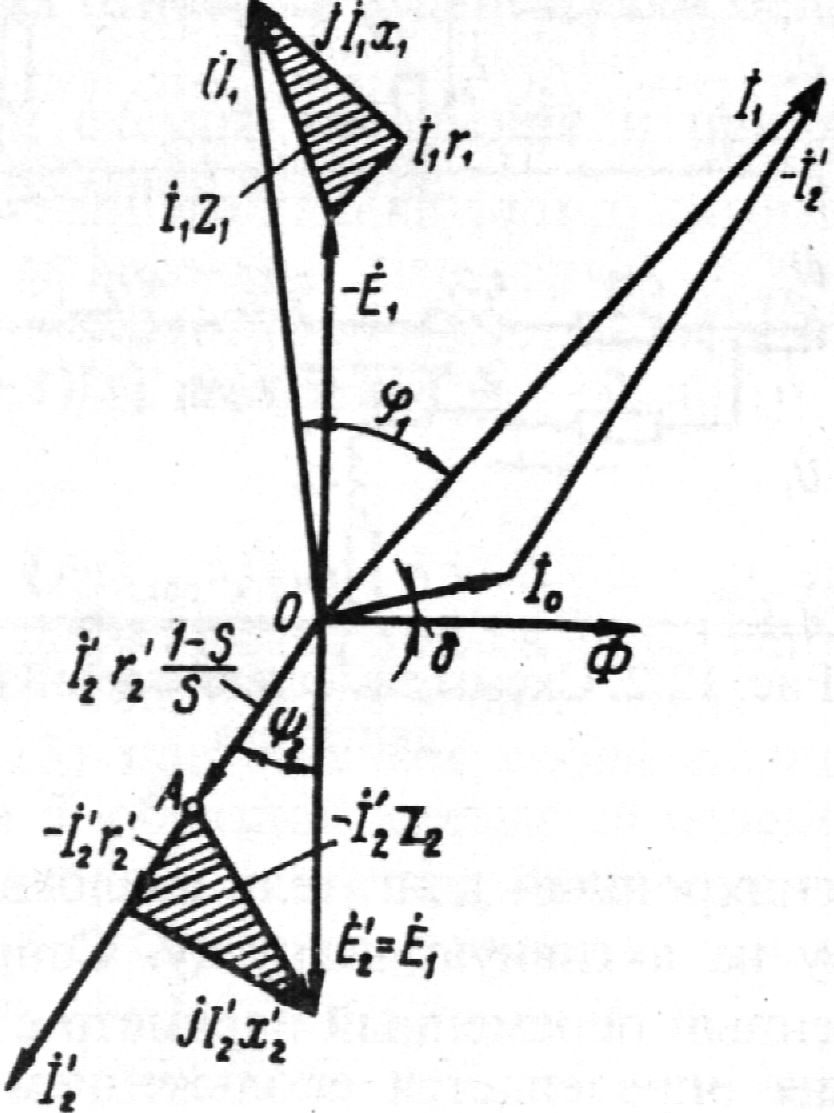
Векторная диаграмма АД отличается от трансформаторной тем, что сумма падений напряжений в обмотке ротора уравновешивается ЭДС Е2’ обмотки неподвижного ротора, т.к. обмотка ротора замкнута. Векторную диаграмму АД можно рассматривать, как векторную диаграмму трансформатора, на зажимы вторичной обмотки которого подключено переменное активное сопротивление.