

Способы регулирования частоты вращения двигателей постоянного тока
Способы регулирования ДПТ
Основным достоинством ДПТ является возможность плавного регулирования скорости в достаточно широких пределах.
W=(U-Ra*Ia)/Co*Ф=(U/ Co*Ф)-(Ra*M/Co2*Ф2)
1. Включение в цепь якоря добавочного сопротивления
Можно использовать пусковой реостат
М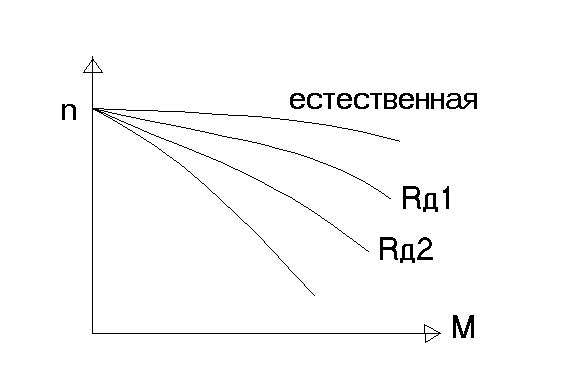 еханическая
характеристика:
еханическая
характеристика:
Rд-добавочное сопротивление
Rд1>Rд2>0
При включении в цепь якоря добавочного сопротивления существенно снижается КПД двигателя, так как появляются дополнительные потери на добавочном сопротивлении.
ΔР=Iа2*Rд
2.Изменение питающего напряжения, так как изоляция в ДПТ рассчитана на номинальное напряжение, то напряжение можно только понижать.
Uном>U1>U2
К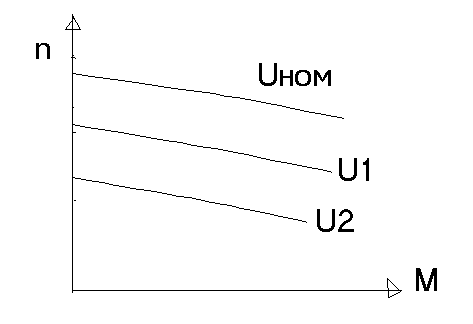 ПД
приданном способе пуска практически
не меняется, но необходим регулируемый
источник питания постоянного тока для
изменения U,
что не всегда экономически целесообразно.
ПД
приданном способе пуска практически
не меняется, но необходим регулируемый
источник питания постоянного тока для
изменения U,
что не всегда экономически целесообразно.
3. Изменение магнитного потока.
В данном случае возможны потери:
ΔР=I2возб*Rвозб
Так как ток возбуждения в десятки паз меньше тока якоря, то эти потери не существенны и КПД в данном случае
остается высоким.

Фном>Ф1>Ф2
Способ регулирования скорости изменением магнитного потока получил наибольшее распространение, так как его легко реализовать. Скорость можно менять как вниз, так и вверх от номинальной при этом КПД остается высоким.
Конструкция и принцип действия синхронного двигателя
Синхронный двигатель – эл. машина перем. тока, у кот. магн. поле, созданное обмоткой перемен. тока, вращается с той же скоростью что и ротор, т.е. синхронно.
С татор
- неподвиж. часть, ротор – подвижная.
Существует 2 вида выполнения ротора: 1)
явнополюсный (собирается из отдельных
частей – вала, крестовины, полюсов); 2)
неявнополюсный (примен. в быстроходных
машинахримен.
внополюсный ()х частей - вала,)
яв
татор
- неподвиж. часть, ротор – подвижная.
Существует 2 вида выполнения ротора: 1)
явнополюсный (собирается из отдельных
частей – вала, крестовины, полюсов); 2)
неявнополюсный (примен. в быстроходных
машинахримен.
внополюсный ()х частей - вала,)
яв
Принцип действия генератора
Ротор генератора приводится во вращение первичным двигетелем, вместе с ротором вращается поле возбуждения, кот. создается пост. током в обмотке возбуждения. Угл. скорость поля возбуждения 1=pротора.
Распределение магн. индукции В0(х) в воздуш. зазоре близко к sinму, благодаря форме полюсов ротора и конструкции обмотки возбуждения. В итоге поле возбуждения – это волна магн. индукции имеющая sinю форму, кот. движется в воздуш. зазоре со скоростью 1.
Отсюда
следует, что во времени потокосцепление
катушки статора изменяется по sin
закону
![]() .
Изменение потока возбуждения, пересекающего
витки статора, наводит в обмотке статора
ЭДС
.
Изменение потока возбуждения, пересекающего
витки статора, наводит в обмотке статора
ЭДС
![]() .
Т.к. ЭДС измен. по sin
закону, то преходя к комплекс. итзображению
получим
.
Т.к. ЭДС измен. по sin
закону, то преходя к комплекс. итзображению
получим
![]() .
Ротор и его магн. поле вращ. с той же
скоростью, что магн. поле статора, т.е.
синхронно. Магн. поле статора неподвижно
относительно вращ. ротора, действует
на пост. токи ротора и создает эл/магн
силы, тормозящие вращение ротора. В
результате тормозной эл/магн момент
уравновешивает момент первич. двиг.
Механич. мощность первич. двигателя =
активной мощности генератора.
.
Ротор и его магн. поле вращ. с той же
скоростью, что магн. поле статора, т.е.
синхронно. Магн. поле статора неподвижно
относительно вращ. ротора, действует
на пост. токи ротора и создает эл/магн
силы, тормозящие вращение ротора. В
результате тормозной эл/магн момент
уравновешивает момент первич. двиг.
Механич. мощность первич. двигателя =
активной мощности генератора.
пдвp=Pэм=Мэмp=3E0I1a (I1a-актив. составляющая тока статора).
Принцип действия двигателя
Статор подключен к 3х фазной сети, токи статора создают вращ. магн. поле. Ротор приведен во вращение, и вращ. с той же скоростью, что и поле статора. В результате воздействия поля статора на пост. токи ротора, возникает эл/магн. момент вращающий ротор. Вращающий момент уравновешивается моментом нагрузки на валу.