

2 Исследовательский раздел
Требуется разработать математическую модель прыгающего робота, алгоритм численного моделирования его движения и реализовать моделирование одного прыжка объекта.
2.1 Описание разрабатываемой конструкции
После анализа существующих конструкций роботов, перемещающихся с отрывом от поверхности, была разработана конструкция прыгающего робота, схема которой изображенная на рисунке 2.1. Задачей данного робота является реализация прыжка на заданную высоту, что достигает за счет позиционирования ноги объекта перед прыжком.

Рисунок 2.1 Структурная схема прыгающего робота: 1 – корпус робота; 2 – кулачок; 3 – пружина; 4 – направляющая пружины; 5 – ползун; 6 – кулиса; 7– стопа; 8 – направляющая ноги; 9 – нога; 10 – привод поворота стопы относительно ноги; 11 - привод поворота кулачка; 12 – привод поворота ноги относительно корпуса
Конструкция робота состоит из корпуса (1), ноги (9), стопы (7) и трех приводов (10), (11), (12), обеспечивающих перемещение звеньев робота друг относительно друга. Корпус устройства соединен с ногой при помощи привода вращательного движения (12), который обеспечивает поворот последней относительно корпуса для реализации прыжка на заданную высоту путем изменения угла наклона ноги к горизонту.
Силу и скорость, необходимые для прыжка робота, создает пружина сжатия (3), которая находится в направляющей (4). Пусковым механизмом является кулачок (2), который приводится во вращение соответствующим приводом (11).
Нога (9) соединена с пружиной посредством кулисы (6). Для того, чтобы не происходило смещения осей пружины и ноги, применяются ползуны (5), которые, перемещаясь по кулисе, не допускают перекосов. Нога движется в направляющей (8). Позиционирование ноги относительно стопы (7) происходит при помощи привода поворота (10). Углы поворота приводов вращательного движения и линейное перемещение ноги измеряются датчиками.
Прыжок реализуется из начального положения, в котором робот стоит на двух ногах, полностью выдвинутых из корпуса. Привод кулачка сжимает пружину, за счет чего ноги втягиваются в корпус, при этом взаимодействие робота с поверхностью осуществляется при помощи корпуса. Внутри корпуса происходит поворот ноги относительно корпуса и стопы относительно ноги соответствующими приводами на углы, необходимые для прыжка на заданную высоту. Когда позиционирование робота завершается, пружина разжимается за счет поворота кулачка, робот отрывается от поверхности. В полете ноги втягиваются в корпус, приземление объекта происходит на корпус.
2.2 Кинематика системы
Будем рассматривать движение робота в плоскости, в которой введем две системы координат: абсолютную неподвижную Оху и относительную – Сх1у1, которая жестко связана с корпусом робота так, что начало координат С совпадает с положением центра масс корпуса, ось Сх1 параллельна стороне АВ. Угол φ определяет поворот системы координат Сх1у1 относительно Оху (рисунок 2.2). Будем считать, что корпус робота является абсолютно твердым телом, имеющим форму прямоугольника с размерами 2а×2b, масса m которого сосредоточена в центре симметрии – точке С.
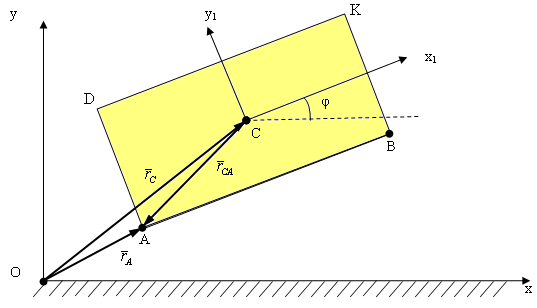
Рисунок 2.2 Кинематическая схема робота
Будем считать, что каждый прыжок робота включает в себя три фазы: разгон, полет и приземление. В первой и третьей фазах робот взаимодействует с опорной поверхностью, в фазе полета робот движется с отрывом от поверхности.
Обобщенными координатами являются проекции хС и уС положения центра масс корпуса на оси абсолютной системы координат и угол φ поворота корпуса.
При разработке математической модели будем считать, что прыжок робота происходит из начального положения, при котором его корпус контактирует с шероховатой горизонтальной поверхностью в точках А и В, причем в точке А при контакте с поверхностью действуют силы нормальной реакции NА и сухого трения Ffr, а в точке В – только нормальная реакция NВ.
Положим, что при приземлении устройства происходит абсолютно неупругий удар, а в первой точке приземления возникают силы нормальной реакции и сухого трения, после чего происходит поворот корпуса относительно этой неподвижной точки до тех пор, пока вторая точка корпуса не коснется поверхности. При этом во второй точке опоры будет возникать только нормальная реакция.
Рассчитаем координаты, скорости и уравнения для точек А, В и С.
Радиус-вектор точки C в абсолютной системе координат определяется как:
![]() , (2.1)
, (2.1)
Координаты
радиуса-вектора
![]() рассчитываем по следующей формуле:
рассчитываем по следующей формуле:
![]() , (2.2)
, (2.2)
где
Т
- матрица поворота, обеспечивающая
перевод координат, определенных в
системе![]() ,
в систему
,
в систему
![]() ;
;
![]() -
радиус-вектор точки A
в относительной системе координат.
-
радиус-вектор точки A
в относительной системе координат.
Матрица поворота Т определяется как:
![]() . (2.3)
. (2.3)
Радиус-вектор
![]() равен:
равен:
![]()
где
a
и b
- расстояния от точки C
до точки A
вдоль осей
![]() и
и
![]() соответственно.
соответственно.
Абсолютный радиус-вектор точки А равен:
![]()
Координаты абсолютных радиусов-векторов точек В, D и К найдем аналогичным образом.
Относительные радиусы-векторы точек имеют вид:
![]() ,
,
![]() ,
,
![]() .
.
Абсолютные радиусы-векторы запишем следующим образом:
![]() ,
,![]() ,
,
![]() .
.
Определим скорости центра масс корпуса – точки С и точек А, В, D, К как производные соответствующих радиусов-векторов.
Вектор
скорости точки C
![]() определяем как:
определяем как:
![]() (2.4)
(2.4)
где
![]() и
и
![]() - проекции вектора скорости точки C
на оси абсолютной системе координат.
- проекции вектора скорости точки C
на оси абсолютной системе координат.
Скорость точки A рассчитаем по следующей формуле:
![]() , (2.5)
, (2.5)
где
![]() - вектор скорости точки A
в относительной системе координат.
- вектор скорости точки A
в относительной системе координат.
Производная матрицы поворота Т выглядит следующим образом:
![]() (2.6)
(2.6)
Вектор скорости точки A в относительной системе координат имеет вид:
![]()
Вектор абсолютной скорости точки А запишем как:

Векторы скоростей точек B, D и К определяем аналогичным образом. Векторы относительных скоростей всех точек нулевые.
 ,
,

 .
.
Вектор
ускорения точки С
![]() определяется как:
определяется как:
![]() (2.7)
(2.7)
где
![]() и
и
![]() - проекции вектора ускорения точки С
на оси абсолютной системе координат.
- проекции вектора ускорения точки С
на оси абсолютной системе координат.
Ускорение точки A рассчитаем по формуле:
![]() , (2.8)
, (2.8)
Вторая производная матрицы поворота Т выглядит следующим образом:
![]() (2.9)
(2.9)
Тогда вектор ускорения точки А имеет вид:

Абсолютные ускорения точек В, D и К равны:


