

5.3.2 Драйвер двигателей
Для управления приводами необходим усилитель мощности, так как:
1) Уровень тока, поступающий из порта микроконтроллера (около 200 мА), слишком мал для работы приводов;
2) Напряжение питания электроприводов намного больше того, которое может обеспечить микроконтроллер;
3) Электропривод представляет собой индуктивную нагрузку, следовательно, напрямую подключать микроконтроллер к приводу нельзя из-за возможных индуктивных выбросов.
В качестве усилителя мощности будем использовать двунаправленный драйвер двигателей постоянного тока MoviPower Lite компании Movicom (рисунок 5.9). Основными достоинствами драйвера являются:
Рабочее напряжение: 5.5 ÷ 36 В
Рабочий ток: до 8 A
Пиковый ток: до 30 A
Частота ШИМ (макс.): 20 кГц
Реверсивное управление
Защита от перегрузки по току и от перегрева
Спящий режим
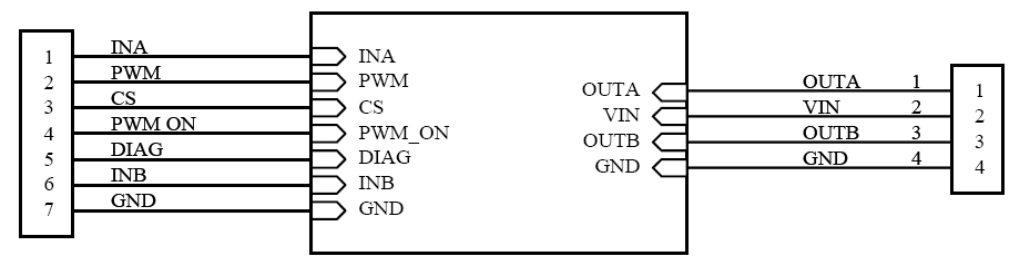
Рисунок 5.6 Распиновка разъемов подключения драйвера


Рисунок 5.7 Сигналы управления, питания и выходные сигналы драйвера
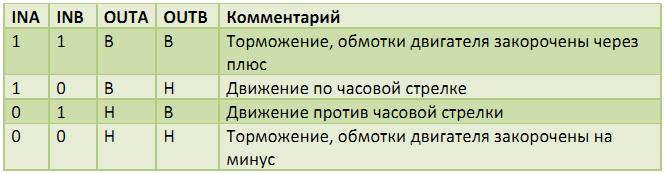
Рисунок 5.8 Таблица истинности работы драйвера (В - низкий сигнал, Н- высокий сигнал)
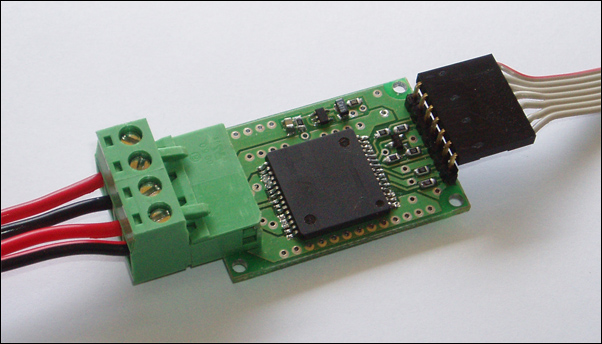
Рисунок 5.9 Драйвер двигателей постоянного тока MoviPower
5.3.3 Энкодеры
Для определения положения звеньев ноги прыгающего робота используются 2 вида энкодеров. Для поворотов ноги относительно ступни и корпуса относительно ноги используется 1 вид (рисунок 5.10):
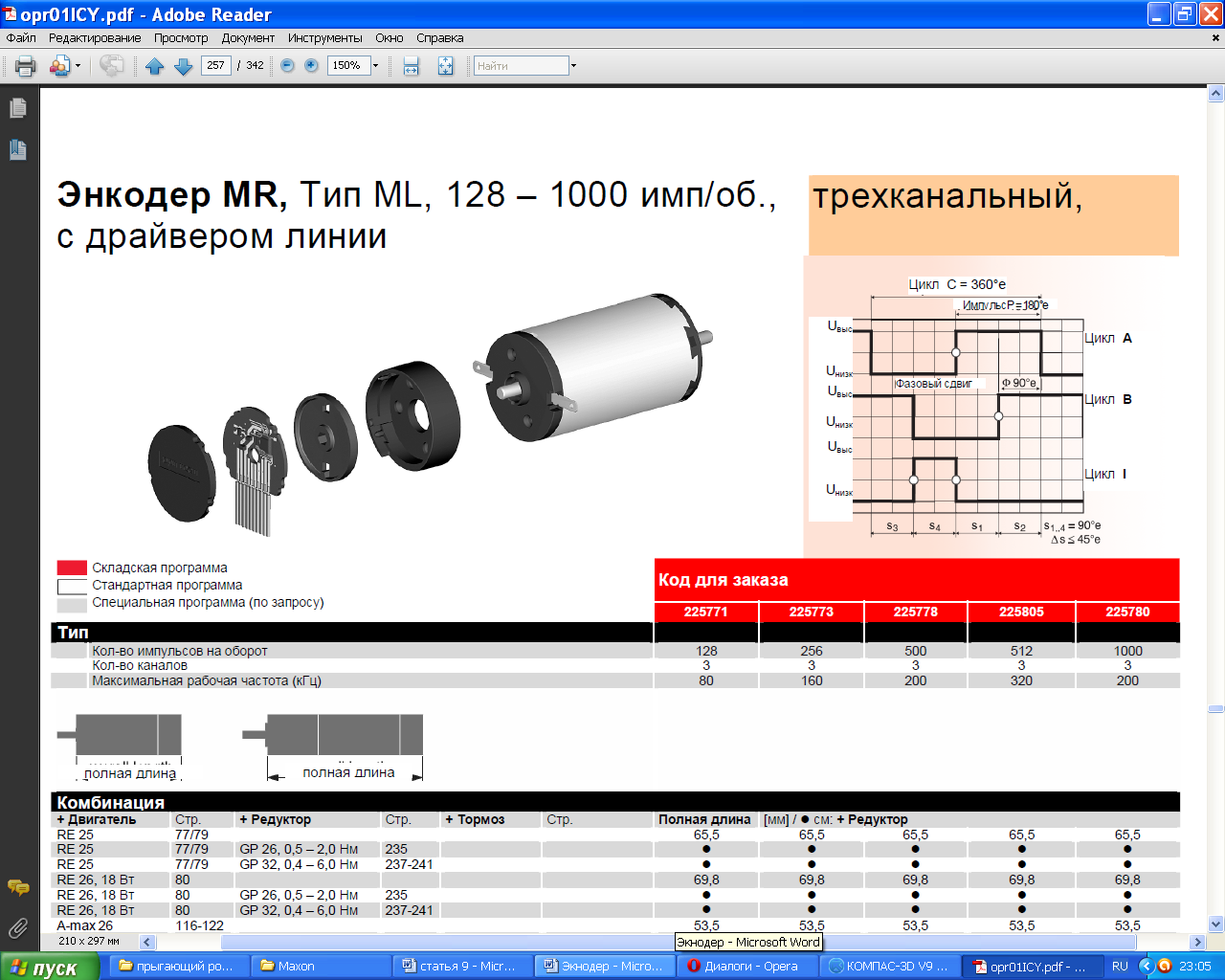
Рисунок 5.10 Энкодер МR, тип ML, 128-1000 имп/0б., с драйвером линий


Рисунок 5.11 Технические характеристики энкодера
Рисунок 5.12 Назначение контактов энкодера
Для определения угла поворота кулачка используется Энкодер МR, тип ML, 256-1024 имп/0б., с драйвером линий


Рисунок 5.13 Технические характеристики энкодера
Назначение контактов энкодера для обоих видов идентично.
5.3.4 Модуль беспроводной передачи данных
Модули беспроводной передачи данных R-Cat (USB и OEM) позволяют организовать беспроводную связь на частоте 433 MГц на расстоянии до одного километра с другими USB или OEM – модулями (OEM-радиомодуль предназначен для интеграции в уже существующие контроллеры). Подходят для беспроводного сбора информации с датчиков, радиоуправления, работы в охранных и пожарных системах.
.В качестве данного модуля выберем RCAT 433 MHZ (рисунок 5.14)

Рисунок 5.14 Модуль беспроводной передачи данных RCAT
Технические данные OEM-радиомодуля:
Рабочее напряжение (макс.): 3.6÷5.5 В
Ток потребления (макс): 40 мА
Радиус действия: 150 м
Скорость передачи по радиоканалу: 9600 бит/с
5.4 Принципиальная схема устройства
С учетом выбранных компонентов спроектируем принципиальную схему ЦСАУ ногой прыгающего робота (рисунок 5.15).
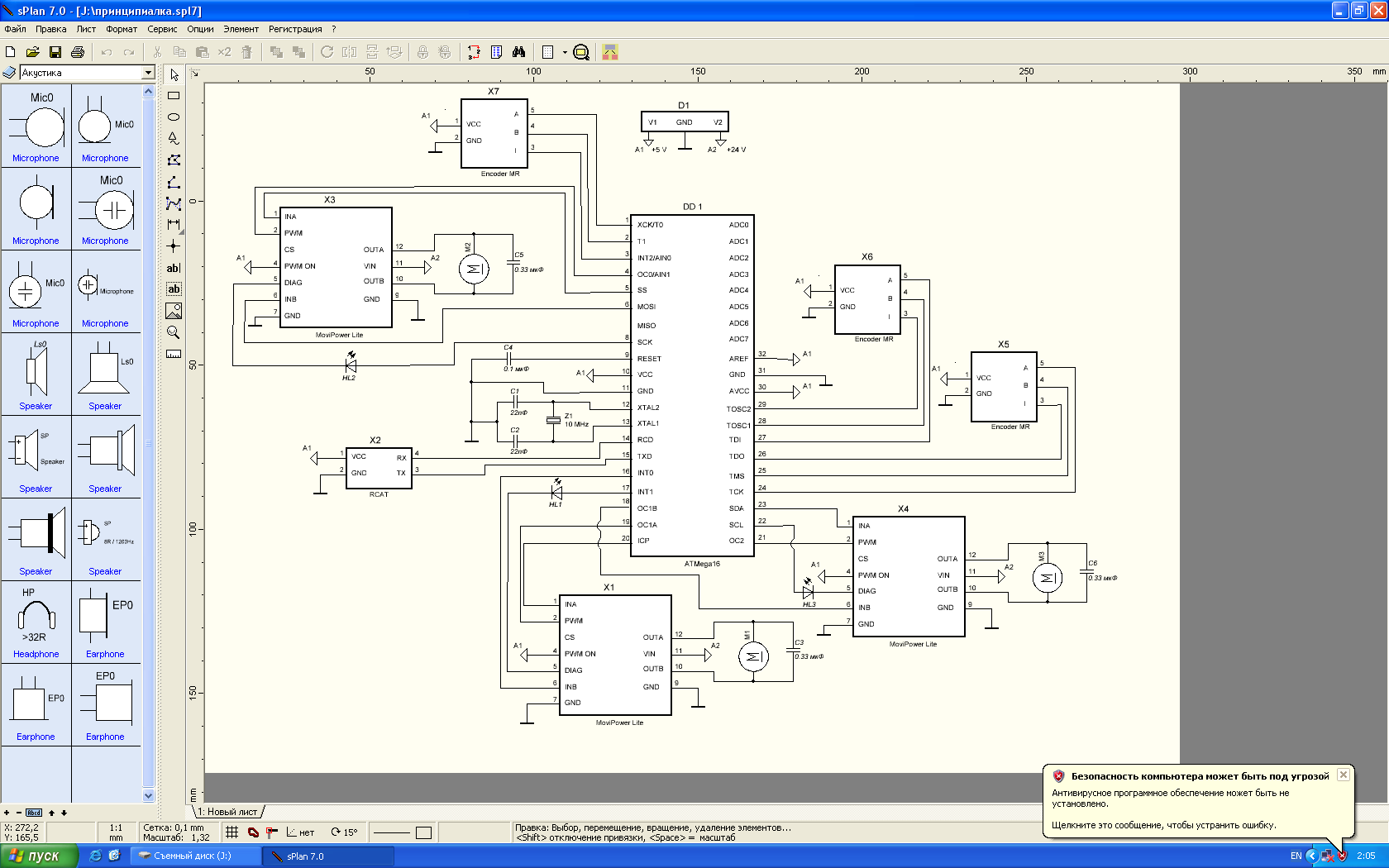
Рисунок 5.15 Принципиальная схема ЦСАУ ногой прыгающего робота
Список компонентов:
D1 – разъемы питания на 24 и 5 В;
DD1 – микроконтроллер ATmega16;
Х1,X3, X4 –драйверные схемы MoviPower Lite;
X2- vодуль беспроводной передачи данных RCAT 433 MHZ;
X5, X6, X7– энкодеры;
M1, M2, М3 – электродвигатели;
Z1 – кварцевый резонатор на 10МГц;
С1, С2 – конденсаторы по 22 пФ;
C4 – конденсатор на 0, 1 мкФ;
C3, C5, С6– конденсаторы по 33 мкФ;
HL1, HL2, HL3 – светодиоды.