


Введение
В наши дни мобильные роботы, являющиеся сложными мехатронными системами, получили очень большое развитие. Первоначально, в 40-е – 70-е гг. 20 в, областями их применения были военная и космическая сферы. Со временем стали создаваться более сложные объекты, которые могут совершать работу в условиях, неприемлемых для жизни и существования человека, например, в зонах с радиацией, доза облучения в которых в несколько раз превышает допустимую. Также мобильные роботы могут совершать работы в местах, куда человек не может проникнуть, в том числе использоваться для диагностики труб малого диаметра, расположенных под землей.
Одним из перспективных направлений развития мобильных роботов являются прыгающие роботы. Интерес к роботам, перемещающимся с отрывом от поверхности, связан с тем, что такие объекты обладают повышенной проходимостью при движении по неровной или пересеченной местности, что существенно расширяет возможности применения мобильных устройств для мониторинга окружающей среды после землетрясений и в других чрезвычайных ситуациях, когда перемещение роботов возможно лишь с использованием прыжков. Конструкции и механизмы движения многозвенных прыгающих роботов построены по аналогии со строением и способом перемещения биологических организмов, перемещающихся при помощи прыжков: кузнечиков, лягушек, кенгуру. Также такой способ движения реализуется спортсменами при прыжках в длину.
В данной выпускной квалификационной работе проведен анализ механизмов реализации прыжка роботами, на основе которого предложена конструкция ноги прыгающего робота, при помощи которой возможно осуществлять прыжок на заданную высоту, разработана цифровая система управления приводами ноги.
1 Анализ существующих конструкций прыгающих роботов
Все множество существующих конструкций прыгающих роботов можно классифицировать по нескольким наиболее распространенным признакам:
вид механизма позиционирования до прыжка,
вид механизма прыжка,
вид механизма позиционирования робота после прыжка.
1.1 Прыгающие роботы, отличающиеся видом механизма позиционирования до прыжка
На рисунке 1.1 показаны основные виды механизмов, при помощи которых робот может позиционироваться до прыжка.

Рисунок 1.1 Механизмы позиционирования прыгающих роботов до прыжка: (A) - поворот робота на месте с помощью колес; (B) - изменение положения центра тяжести; (C) - поворот робота на месте при помощи ноги; (D) - поворот механизма, реализующего прыжок, относительно корпуса робота
Ниже приведены конструкции прыгающих роботов, в которых реализованы описанные типы позиционирования.
Робот “scout robot”, прыгающий по ступенькам, представляет собой колесную систему весом 200 г, которая прыгает за счет силы пружины, намотанной вокруг его корпуса (рисунок 1.2). Движение в заданном направлении обеспечивается поворотом робота перед прыжком.

Рисунок 1.2 Прыгающий робот “scout robot”
Прыгающий робот «Sandia» весом 2.5 кг осуществляет прыжок при помощи поршневого привода и камеры сгорания, установленной в сферическом пластмассовом корпусе. После приземления устройство находится в устойчивом положении и может поворачивать свой центр масс для изменения ориентации и реализации следующего прыжка (рисунок 1.3).

Рисунок 1.3 Прыгающий робот «Sandia»
“Minimalist jumping robot” имеет массу 1.3 кг и может после приземления изменить свою конструкцию, чтобы стать вертикально, для следующего прыжка (рисунок 1.4). Изменение направления происходит за счет поворота робота относительно ноги.

Рисунок 1.4 Прыгающий робот “minimalist jumping robot”
1.2 Прыгающие роботы, отличающиеся видом механизма прыжка
Различают прыгающих роботов, приводимых в движение следующими видами приводов:
1. Гидравлические.
2. Пневматические.
3. Пружинные.
4. Камера сгорания.
“Rescue robot” имеет массу 2 кг и может, благодаря полусферам на одной стороне колес, вертикально приземлиться. Затем его можно развернуть, используя колеса. Прыжок реализуется при помощи пневматического привода (рисунок 1.5).
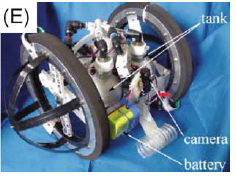
Рисунок 1.5 Прыгающий робот “rescue robot”
Робот состоит из привода, включающего в себя двигатель, зубчатые колеса и кулачок, ноги, карбоновых стержней, используемых в качестве стопы, инфракрасного приемника и аккумулятора (рисунок 1.6). Изменяя геометрические пропорции ноги, можно регулировать угол взлета, время разгона и траекторию стопы. Вес робота составляет 6.98 г.

Рисунок 1.6 Прыгающий робот кузнечик
Робот PIGORASS двигается при помощи 10 пневматических «мышц», управляемых внешним воздушным компрессором с датчиками давления, и 10 инертных «мышц»-пружин (рисунок 1.7). Общий вес механизма – 4 кг, длина тела – 35 см.

Рисунок 1.7 Прыгающий робот PIGORASS
Precision Urban Hopper представляет собой наземного робота, способного перепрыгивать препятствия около 7,5 м в высоту. Полученный робот, размером с ноутбук, большую часть времени передвигается на четырех колесах при помощи электромотора, а для прыжков задействует поршневой механизм (рисунок 1.8).

Рисунок 1.8 Робот Precision Urban Hopper
Прыгающий механизм робота One-Legged Hopping Robot состоит из корпуса, в котором установлен электродвигатель, ноги и аккумулятора (рисунок 1.9). Помимо этого, конструкция оснащена плитой основания и двумя вертикальными линейками, ограничивающими перемещение вдоль вертикальной оси. Нога взаимодействует с корпусом посредством пружины. Трос, который сжимает пружину, одним концом взаимодействует с алюминиевым стержнем, а вторым – с валом конической зубчатой передачи.


Рисунок 1.9 One-Legged Hopping Robot
Робот Uniroo совершает прыжок на 10 см в высоту и приземляется на стопу. Каждый прыжок происходит за 0,7 с. В течение каждого прыжка робот движется вперед, приземляется, сгибает ногу, толкается и перемещает ногу вперед в течение полета.
Робот имеет трехуровневую систему управления (рисунок 1.10). Нижний уровень контролирует работу приводов. Второй уровень, работающий во время фазы нахождения робота на поверхности, выбирает заданные значения для нижнего уровня и отвечает за положение бедра робота, нулевую точку и т.д. Третий уровень работает, управляя скоростью движения вперед и высотой прыжка.

Рисунок 1.10 Прыгающий робот Uniroo