

3. Стежні гідроприводи
Гідропривід, в якому вихідна ланка повторює рух ланки керування у заданому масштабі, називають стежним.
Стежний гідропривід широко застосовують у системах ручного і автоматичного керування різних машин, агрегатів та виробничих процесів. Щодо сільськогосподарської техніки, такий гідропривід використано у системах автоматичного водіння (САВ) мобільних агрегатів орних, гичко- і коренезбиральних машин, зернозбиральних комбайнів тощо, а також у гідравлічних системах автоматичного керування (регулювання): силового під час оранки, завантаження активних робочих органів збиральних машин, положення робочих органів тощо.
Коефіцієнт підсилення, який визначається відношенням вихідної потужності до потужності вхідного сигналу, практично не обмежений. Так, у системах рульового керування великими морськими суднами використовують стежні гідроприводи з коефіцієнтом підсилення 105, а у системах автоматики з електрогідравлічним керуванням — до 107. Таке велике значення коефіцієнта підсилення досягається завдяки незначній потужності, яка витрачається на керування. Наприклад, потужність вхідного сигналу у гідропідсилювачі з електричним керуванням становить 0,5 - 1 Вт, а зусилля для переміщення золотників не перевищує 40 мН.
Стержні гідроприводи залежно від типу гідродвигуна бувають з поступальним, поворотним і обертальним рухом вихідної ланки.
1 - рульове
колесо; 2
- гвинтова
пара; 3 -
дроселювальний
гідророзподільник; 4
- гідроциліндр;
5 - корпус
гідророзподільника; 6
- траверса
Рис.
3.1 Схема
стежного гідроприводу поступального
руху
Н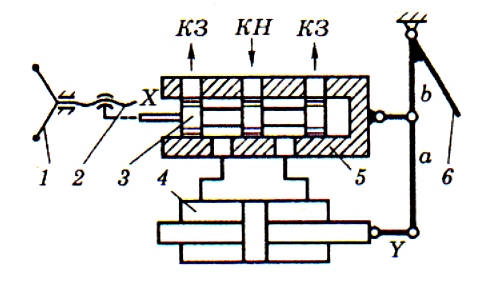 а
рис. 3.1 показано схему 1 стежного
гідроприводу поступального руху, що
використаний як гідропідсилювач руля
ґрунтозміщувальної машини. При повороті
рульового колеса 2, наприклад за стрілкою
годинника, завдяки гвинтовій парі 2
золотник З дроселювального гідророзподільника
зміститься вліво і сполучить праву
порожнину гідроциліндра 4 з напірним
каналом (КН), а ліву — зі зливним (КЗ).
Під дією потоку рідини шток гідроциліндра
почне перевищуватись вліво, повертаючи
шарнірно з’єднану з ним траверсу 6, а
разом із нею і передній коток машини.
Поворот котка відбуватиметься доти,
поки корпус 6 розподільника, який
переміщується разом з траверсою, не
зміститься на величину ходу, що дорівнює
зміщенню золотника, і знову не перекриє
канали розподільника. Щоб повернути
коток у вихідне положення, рульове
колесо потрібно повернути на такий
самий кут проти стрілки годинника.
Внаслідок цього золотник, поршень,
траверса і, отже, корпус розподільника
повернуться у вихідне положення. Так
відбувається стеження котка за поворотом
рульового колеса. Коефіцієнт підсилення
гідропідсилювача КГ
у цьому разі можна виразити співвідношенням
КГ
= F/F3, де F— зусилля, створюване на поршні
гідроциліндра, Fз — зусилля, необхідне
для переміщення золотника. Важливим
параметром стежного гідроприводу є
коефіцієнт передачі, який визначається
відношенням лінійної або кутової
величини переміщення ланки до величини
переміщення вхідної ланки. Для наведеної
схеми вхідним сигналом на гідропідсилювач
руля є переміщення X золотника, а вихідним
— переміщення У поршня гідроциліндра.
Тоді коефіцієнт передачі можна визначити
співвідношенням Кп- (а + b)b, де а і b —
плечі важеля траверси 6.
а
рис. 3.1 показано схему 1 стежного
гідроприводу поступального руху, що
використаний як гідропідсилювач руля
ґрунтозміщувальної машини. При повороті
рульового колеса 2, наприклад за стрілкою
годинника, завдяки гвинтовій парі 2
золотник З дроселювального гідророзподільника
зміститься вліво і сполучить праву
порожнину гідроциліндра 4 з напірним
каналом (КН), а ліву — зі зливним (КЗ).
Під дією потоку рідини шток гідроциліндра
почне перевищуватись вліво, повертаючи
шарнірно з’єднану з ним траверсу 6, а
разом із нею і передній коток машини.
Поворот котка відбуватиметься доти,
поки корпус 6 розподільника, який
переміщується разом з траверсою, не
зміститься на величину ходу, що дорівнює
зміщенню золотника, і знову не перекриє
канали розподільника. Щоб повернути
коток у вихідне положення, рульове
колесо потрібно повернути на такий
самий кут проти стрілки годинника.
Внаслідок цього золотник, поршень,
траверса і, отже, корпус розподільника
повернуться у вихідне положення. Так
відбувається стеження котка за поворотом
рульового колеса. Коефіцієнт підсилення
гідропідсилювача КГ
у цьому разі можна виразити співвідношенням
КГ
= F/F3, де F— зусилля, створюване на поршні
гідроциліндра, Fз — зусилля, необхідне
для переміщення золотника. Важливим
параметром стежного гідроприводу є
коефіцієнт передачі, який визначається
відношенням лінійної або кутової
величини переміщення ланки до величини
переміщення вхідної ланки. Для наведеної
схеми вхідним сигналом на гідропідсилювач
руля є переміщення X золотника, а вихідним
— переміщення У поршня гідроциліндра.
Тоді коефіцієнт передачі можна визначити
співвідношенням Кп- (а + b)b, де а і b —
плечі важеля траверси 6.