

5.4.2 Исследование наблюдаемости уоу и его каналов измерения выходных переменных
Динамическая система считается наблюдаемой, если путем наблюдений выходной переменной y система за сколь угодно малый промежуток времени t от t0 до t1, где t1>t0 наблюдается вектор входных механизмов u и зная математическую модель динамической системы можно восстановить истинное состояние вектора состояния в момент t0.
Для оценки наблюдаемости динамической системы существует критерий наблюдаемости:
![]()
Система является вполне наблюдаемой, если ранг матрицы наблюдаемости равен порядку этой системы. Система является частично наблюдаемой, если ранг матрицы наблюдаемости меньше и больше нуля. Система
является полностью ненаблюдаемой, если ранг матрицы наблюдаемости равен нулю.
Оценка наблюдаемости по выходу y1
![]()
![]()

![]()
![]()
Вывод: система вполне наблюдаема по выходу y1 т. к. ранг матрицы равен порядку системы.
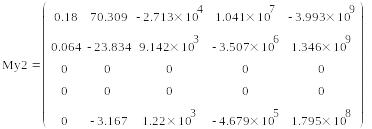
Оценка наблюдаемости УОУ по выходу y2
![]()
![]()
![]()
![]()
Вывод: система частично наблюдаема по выходу y1 т. к. ранг матрицы меньше порядка системы. Дефект наблюдаемости равен двум.
Оценка наблюдаемости системы в целом
![]()
![]()

![]()
![]()
Вывод: в целом система вполне наблюдаема т. к. ранг матрицы равен порядку системы.
С источником ошибки понятно.
Указания по дальнейшей работе надеюсь прислать к началу той недели.
РАН