

4.4. Сравнительная оценка синтезированных сау
В результате применения операторного метода и метода отождествления высших производных при синтезе закона управления объектом были получены САУ, удовлетворяющие в обоих случаях критериальной стратегии.
Однако, несмотря на данное преимущество каждый из этих методов имеет свои существенные недостатки:
1. Операторный метод синтеза ЗУ приводит к получению трудно реализуемого управляющего устройства высокого порядка.
2. Метод отождествления высших производных приводит к формированию АСУ с ЗУ, содержащим производные высших порядков, вплоть до (n-1)-й, что делает закон практически нереализуемым, но теоритически применимым.
Раздел 5 Построение и исследование матрично векторных форм математических моделей (мм) уоу
5.1 Построение матрично-векторных(МВ) ММ УОУ
Для построения МВ-формы ММ неполных и многомерных УОУ используется прямой способ построения МВ ММ по структурной схеме УОУ. Если считать, что исследуемая в работе схема соответствует реальной физической или технической структуре объекта, МВ-форму легко получить, приняв за переменные состояния (ПС) выходные переменные всех входящих в схему динамических звеньев.
Переменные состояния для рассматриваемой схемы УОУ обозначены так, как показано ниже на рисунке 5.1.
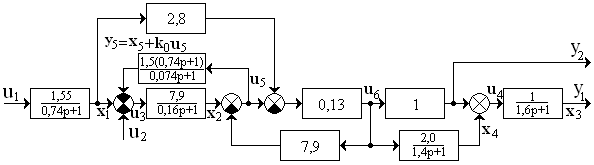
Рисунок 5.1 – Схема УОУ с обозначением переменных состояния
Поскольку все ДЗ схемы имеют первый порядок, то последовательная запись их ДУ в систему в форме Коши, в которой входной сигнал звена представлен с учетом полной структуры его формирования из ПС и входных воздействий, позволяет получить МВ форму ММ.
Для составления дифференциальных уравнений (ДУ) воспользуемся следующими преобразованиями:
Для
![]() ,
получим:
,
получим:![]() .
.
Для
![]() ,
получим:
,
получим:
![]() .
.
Для
![]() ,
получим:
,
получим:
![]() ,
где k0=b1;
k1=b0–a0k0;.
,
где k0=b1;
k1=b0–a0k0;.
В результате система ДУ будет иметь следующий вид:
![]()
Приведём
![]() к
нормальной форме:
к
нормальной форме:
![]()
Вычислим коэффициенты ki:
![]()
Таким образом, ДУ примет следующий вид:
![]()
Выведем значения переменных, введённых для упрощения преобразований:

Таким образом, значения временных переменных равны:

Подставим эти значения в ДУ:
![]()
Применив элементарные преобразования получим:
![]()
![]()
5.2 Проверка эквивалентности вход-выходной и матрично-векторной ММ
По системе ДУ, образующих МВ модель, построим структурную схему объекта и исследуем его в ППП CLASSIC (рисунок 5.2).

Рисунок 5.2 – Модель ДУ в CLASSIC
В основе построения структурной схемы по МВ описанию лежат правила:
Таблица 5.1 – Результаты ППП CLASIC и ППП Mathcad
Схема моделирования МВ формы ММ |
Схема моделирования вход-выходной ММ |
Канал u1-y1 |
|
Ном.Система Нули: z1 = -1.704973 z2 = -2.142854 z3 = -776.318235 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507201 p5 = -383.636313 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Ном.Система Нули: z1 = -1.704973 z2 = -2.142857 z3 = -776.317469 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507199 p5 = -383.636186 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Канал u1-y2 |
|
Ном.Система Нули: z1 = -0.625000 z2 = -0.714286 z3 = -1.704974 z4 = -776.315781 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507201 p5 = -383.636313 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Ном.Система Нули: z1 = -0.625000 z2 = -0.714286 z3 = -1.704973 z4 = -776.317469 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507199 p5 = -383.636186 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Канал u2-y1 |
|
Ном.Система Нули: z1 = -1.351351 z2 = -2.142849 z3 = -13.513514 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507201 p5 = -383.636313 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Ном.Система Нули: z1 = -1.351351 z2 = -2.142857 z3 = -13.513514 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507199 p5 = -383.636186 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Канал u2-y2 |
|
Ном.Система Нули: z1 = -0.625000 z2 = -0.714286 z3 = -1.351351 z4 = -13.513514 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507201 p5 = -383.636313 Абсолютное затухание: 0.625 Относительное затухание: 0 |
Ном.Система Нули: z1 = -0.625000 z2 = -0.714286 z3 = -1.351351 z4 = -13.513514 Полюсы: p1 = -0.625000 p2 = -0.714286 p3 = -1.351351 p4 = -1.507199 p5 = -383.636186 Абсолютное затухание: 0.625 Относительное затухание: 0 |
для каждого ДУ в схему добавляется интегратор (звено с
 ),
входным сигналом которого является
производная переменной состояния (
),
входным сигналом которого является
производная переменной состояния ( ),
а выходным – сама переменная состояния
),
а выходным – сама переменная состояния
 ;
;в соответствии с ДУ на вход интегратора через усилительные звенья подаются входные воздействия и переменные состояния;
выходные сигналы формируются по уравнению наблюдения как сумма переменных состояния.
Значения нулей, полученные по матрично-векторной ММ и вход-выходной ММ, практически совпадают. Следовательно, преобразования были выполнены корректно.
5.3 Построение передаточной матрицы УОУ по МВ ММ
Запишем модель объекта в матрично-векторной форме. Вычислим далее передаточную матричную функцию многомерной системы с помощью алгоритма Леверье – Фадеева.
![]() (5.1),
(5.1),
где
 - вектор переменных состояния,
- вектор переменных состояния,
![]() - вектор входных значений
- вектор входных значений
![]() - вектор выходных воздействий.
- вектор выходных воздействий.
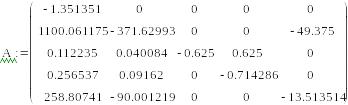
Системная матрица А:

Матрица управления В:

Матрица наблюдений С:
![]()
Матрицу
![]() ,
задающую связь между векторами выхода
,
задающую связь между векторами выхода
![]() и входа
и входа
![]() называют передаточной матричной
функцией многомерной системы. Её
построение проще осуществляется с
использованием алгоритма Леверье –
Фадеева, который состоит в следующем:
называют передаточной матричной
функцией многомерной системы. Её
построение проще осуществляется с
использованием алгоритма Леверье –
Фадеева, который состоит в следующем:
Представим передаточную матричную функцию как отношение двух полиномов:
![]() ,
(5.2)
,
(5.2)
где
![]() – характеристический полином,
– характеристический полином,
![]() – некоторый матричный полином
– некоторый матричный полином
Коэффициенты
![]() и матрицы
и матрицы
![]() можно вычислить по следующим формулам:
можно вычислить по следующим формулам:


Окончательно
![]()
Данный алгоритм для нашего УОУ реализуем с помощью Mathcad (файл 5_3.xmcd прилагается):
Итерация 1
![]()
![]()
![]()
![]()
![]()
Итерация 2
![]()

![]()
![]()
![]()

![]()
Тогда передаточна
матрица равна:![]()
![]()

Сравним полученные канальные ПФ с полученными ранее ПФ в разделе 2.2 данной курсовой работы:
;
![]() ;
;
![]() ;
;
.
Как видим полученные разными путями ПФ практически совпадают, несовпадения объясняются погрешностями в вычислениях.
5.4 Исследование и преобразование матрично-векторных ММ УОУ
Системная матрица А:

Матрица управления В:
Матрица наблюдений С:
5.4.1 Исследование управляемости УОУ и его каналов воздействия на выходные переменные
В данном пункте приводится оценка управляемости и наблюдаемости. Эти свойства исследуются как по отдельным его входам и выходам, так и для объекта в целом.
Управляемость – свойство динамической системы, при которой её можно перевести из любого начального состояния x0 в любое конечное за конечный промежуток времени.
Для построения и оценки матриц управляемости и наблюдаемости используется ППП MathCAD.
Свойство управляемости оценивается матрицей управляемости:
![]() .
(5.3)
.
(5.3)
Динамическая
система является вполне управляемой,
если ранг матрицы
![]() равен
равен
![]() .
Система не вполне управляема, если ранг
матрицы
меньше
и больше 0. Система является полностью
неуправляемой, если ранг матрицы
управляемости
равен нулю.
.
Система не вполне управляема, если ранг
матрицы
меньше
и больше 0. Система является полностью
неуправляемой, если ранг матрицы
управляемости
равен нулю.
Формула для нахождения матрицы управляемости:
![]() ,
,
где A- системная матрица, B – входная матрица, С – матрица наблюдения.
n=5 – порядок системы.
Оценка управляемости УОУ по входу u1
Оценка управляемости УОУ по входу u1

![]()
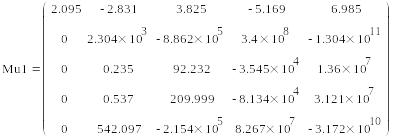
![]()
![]()
Вывод: система
вполне управляема по входу
![]() ,
т. к. ранг матрицы равен порядку системы
– 5.
,
т. к. ранг матрицы равен порядку системы
– 5.
Оценка управляемости УОУ по входу u2

![]()
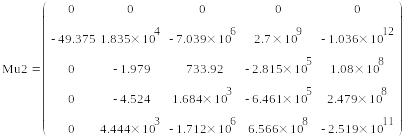
![]()
![]()
Вывод: система частично управляема по входу u2, т. к. ранг матрицы меньше порядка системы и равен 4.
Дефект d = n – r(My) = 5 – 4 = 1.
Оценка управляемости системы в целом
Оценка управляемости системы в целом
![]()
Вывод: в целом система вполне управляема, т. к. ранг матрицы равен порядку системы – 5.