

3 Проверочный расчет валов
3.1 Составление расчетных схем в цилиндрической зубчатой передаче
При заполнении таблицы 3.1 усилия, действующие в зацеплении, берутся из расчета зубчатой цилиндрической передачи.
Таблица 3.1 – Усилия, действующие в передаче, Н
Наименование усилия |
Расчетная формула |
Результаты расчета |
Окружное, Н |
|
|
Радиальное, Н |
|
|
Осевое, Н |
|
|
*Делительный диаметр шестерни, мм |
dw1 = d1 |
|
*Делительный диаметр колеса, мм |
dw2 = d2 |
|
*В прямозубой передаче угол наклона на делительном цилиндре равен нулю ( = 0), осевое усилие отсутствует (Fа = 0), и значения делительных диаметров при расчете валов не используются, поэтому в таблицу 3.1 их можно не записывать.
Сила давления на вал от неуравновешенной окружной силы муфты
|
(9) |
|
(10) |
где Т1, 2 – крутящие моменты на ведомом и ведущем валах, соединяемых муфтой, соответственно [Нм];
Сила давления на вал от натяжения ремней в клиноременной передаче
|
(11) |
где |
F0 – сила предварительного натяжения, Н; z – число клиновых ремней; α1 – угол обхвата ремнем ведущего шкива, град. |
Сила предварительного натяжения для клинового ремня
|
(12) |
где |
P – номинальная мощность двигателя, P = Pэл, кВт; Ср – коэффициент динамической нагрузки и длительности режима работы; Сl – коэффициент, учитывающий влияние длины ремня; Сα – коэффициент угла обхвата на меньшем шкиве; V – скорость ремня, м/с;
θ
– коэффициент, учитывающий центробежную
силу,
|
Таблица 3.2 – Значение коэффициента, учитывающего центробежную силу
При сечении |
0 |
А |
Б |
В |
Г |
θ |
0,06 |
0,1 |
0,18 |
0,3 |
0,6 |
Коэффициент,
учитывающий центробежную силу
![]() выбирается с учетом принятого сечения
ремня (рисунок 3.1).
выбирается с учетом принятого сечения
ремня (рисунок 3.1).
Пример:
При
![]() и
и
тип сечения ремня – Б. Принимаем θ = 0,18.
По таблице 3.3 с учетом значения крутящего момента на валу ведущего шкива (Тэл.) предварительно принимается делительный диаметр ведущего шкива клиноременной передачи.
Пример:
Величина вращающего момента Тэл. = 64 Нм, по таблице 3.3 для сечения ремня Б, принимаем dmin = 125 мм.
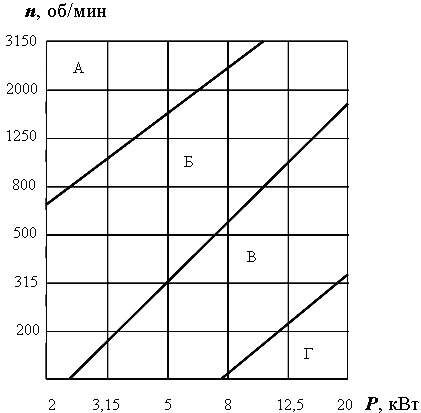
Рисунок 3.1 – Номограмма для выбора клиновых ремней
нормального сечения
Таблица 3.3 - Минимальные значения диаметра меньших шкивов для передачи крутящих моментов
Обозначение сечения ремня |
Нормального сечения |
||||
О |
А |
Б |
В |
Г |
|
Крутящий момент, Нм |
<30 |
15...60 |
50...150 |
120…600 |
450…2400 |
d1min, мм |
63 |
90 |
125 |
200 |
315 |
Диаметр ведомого шкива клиноременной передачи
d2 = d1min∙U2, |
(13) |
где U2 – передаточное число клиноременной передачи (получено в пункте расчета 1.8.1).
Значение диаметра ведомого шкива округляют до ближайшего числа из стандартного ряда: 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 400, 450, 500, 630, 710, 800, 900, 1000.
Скорость ремня
|
(14) |
где nном – номинальная частота вращения вала электродвигателя
nном = nэл, мин-1. |
(15) |
Число клиновых ремней
|
(16) |
где [Рп] – допускаемая мощность, передаваемая одним клиновым ремнем, кВт.
Для ремня типа |
О - [Рп] ≈ 1,1кВт, А - [Рп] ≈ 2,0 кВт, Б - [Рп] ≈ 3,5 кВт, В - [Рп] ≈ 4,1 кВт, Г - [Рп] ≈ 8,5 кВт. |
Коэффициент влияния отношения расчетной длины ремня к базовой принимаем Сl =1.
Коэффициент режима работы Ср = 1 (спокойный характер нагрузки).
Коэффициент угла обхвата Cα на меньшем шкиве определяется по таблице 3.4 после определения угла обхвата.
|
(17) |
где а – межосевое расстояние ременной передачи, мм.
Таблица 3.4 – Значения коэффициента, учитывающего угол обхвата на малом шкиве
Угол обхвата, град. |
180 |
170 |
160 |
150 |
140 |
130 |
120 |
Cα |
1 |
0,98 |
0,95 |
0,92 |
0,89 |
0,86 |
0,83 |
Ориентировочно межосевое расстояние принимается средним из диапазона
аmin
|
(18) |
аmax 2 (d1 +d2), |
(18, а) |
где h0 – высота сечения клинового ремня, мм.
Таблица 3.5 – Размеры высоты сечения клинового ремня нормального сечения
Тип сечения ремня |
О |
А |
Б |
В |
Г |
h0, мм |
6 |
8 |
10,5 |
13,5 |
19 |
Сила давления на вал от цепной передачи
|
(19) |
|
(20) |
где Т2 – крутящий момент на тихоходном валу редуктора (на валу малой тяговой звездочки) Нм;
dзв – делительный диаметр тяговой звездочки, мм
|
(21) |
где z1 – число зубьев тяговой звездочки,
t – шаг цепи, мм.
z1 = 31 – 2 U2 , |
(22) |
где U2 – передаточное число цепной передачи (определяется при выборе электродвигателя).
Полученное значение Z1 по формуле (22) округляется до целого числа.
Шаг цепи передачи
|
(23) |
 ,
,
где [Р] - допускаемое напряжение в шарнирах роликовой цепи, МПа.
Для проектировочного расчета рекомендуется принимать [Р]=20МПа. Расчетное значение шага t, полученное по формуле (23), округляется до стандартного значения по таблице 3.6.
Таблица 3.6 - Выдержка из ГОСТ 13568-75 на цепи приводные роликовые однорядные ПР
t, мм |
9,525 |
12,7 |
15,875 |
19,05 |
25,4 |
31,75 |
38,1 |
44,45 |
50,8 |
g, Н/м |
0,45 |
0,75 |
1,0 |
1,9 |
2,6 |
3,8 |
5,5 |
7,5 |
9,7 |
Радиальная нагрузка, действующая на вал, от цепной передачи
FУ = 2 Ff , H. |
(24) |
Нагрузка от провисания цепи
Ff = 9,81 Kf g a |
(25) |
где |
Kf – |
коэффициент, учитывающий расположение цепи; |
|
Kf = |
1,5, т.е. расположение цепи под 45°; |
|
Kf = |
6 при горизонтально расположенной цепи; |
|
Kf = |
1,5 при наклонном расположении цепи (под 45°); |
|
Kf = |
1 при вертикальном расположении цепи; |
|
а - |
межосевое расстояние, м; |
|
g - |
масса 1 м цепи (таблица 3.6). |
Ориентировочно межосевое расстояние принимается средним из диапазона, мм
аmin = 30t, аmax = 50t. |
(26) |
После определения всех усилий, действующих на валы, составляются расчетные схемы (рисунки 2П-7П). При составлении схем усилий учитываются следующие правила: направление окружной силы Ft2 на колесе совпадает с направлением вращения зубчатого колеса (n2), а на шестерне Ft1 – противоположно её вращению (n1) и действуют вдоль оси Х. Сила Fr всегда направлена по вертикальной оси Y к центру вращения зубчатых колес; направление силы Fa зависит от направления наклона зуба (правое или левое) и действует вдоль оси Z.
Консольная сила от ременной (или цепной) передачи Fо проставляется в соответствии с положением передачи в кинематической схеме привода или может быть направлена вертикально, горизонтально или под углом к горизонту.
Консольная сила от муфты Fм направлена по оси Х, поэтому рекомендуется принять наихудший случай нагружения и направить силу Fм противоположно силе Ft.