

2.2.2 Адаптивное управление
Адаптивной называется система управления, если она способна идентифицировать или уточнять модель объекта и (или) регулятор способен автоматически оптимально настраиваться. При настройке регулятора было получено, что коэффициенты kп, kи и kд являются функциями параметра K, который можно определить по формуле (40), зная ток двигателя iд. Таким образом, регулятор можно сделать адаптивным, если его коэффициенты будут вычисляться автоматически.
Как следует из уравнения (86), коэффициент интегральной составляющей при подстановке выражения (40) вычисляется по формуле:
|
(91) |

или в сокращенном виде:
|
(92) |

где
|
(93) |

Для дифференциальной составляющей:
|
(94) |

где
|
(95) |
Для пропорциональной составляющей:
|
(96) |

или в сокращенном виде:
|
(97) |

где
|
(98) |
|
(99) |


Схема системы с адаптивным ПИД-регулятором приведена на рисунке 26. Внутренняя структура регулятора представлена на рисунке 27. Так как параметры регулятора имеют обратную зависимость от тока двигателя, то для исключения ошибки деления на ноль в нулевой момент времени, когда ток двигателя равен нулю, вводится начальное малое значение тока двигателя.

Рисунок 26 – Структурная схема системы с адаптивным ПИД-регулятором
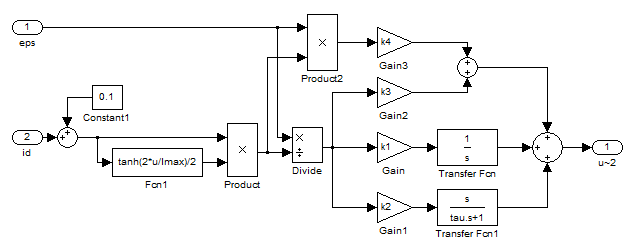
Рисунок 27 – Структурная схема адаптивного ПИД-регулятора
В результате моделирования работы замкнутой системы получим временные диаграммы управляющего напряжения u2 (рисунок 28), скорости вращения Ω (рисунок 29) и токов iд и iг (рисунки 30 и 31). Поскольку скорость Ω(t) получилась близкой к желаемой траектории g(t), построим изменение ошибки ε(t) (рисунок 32).
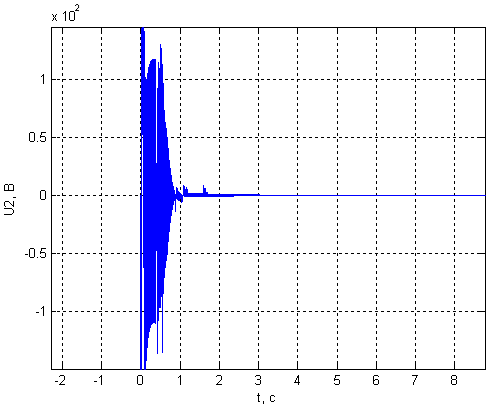
Рисунок 28 – Временная зависимость управляющего напряжения u2
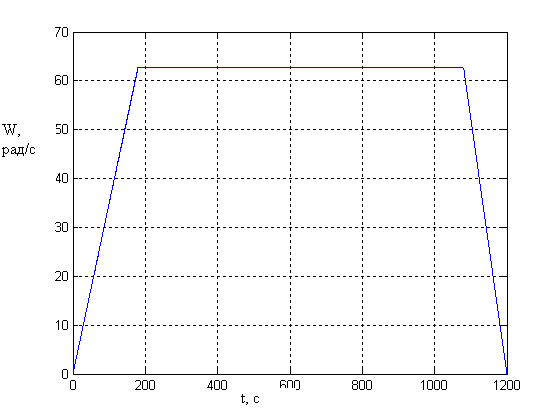
Рисунок 29 – Временная зависимость скорости вращения Ω
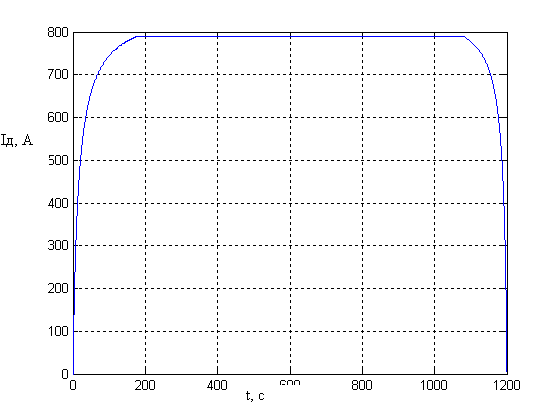
Рисунок 30 – Временная зависимость тока iд
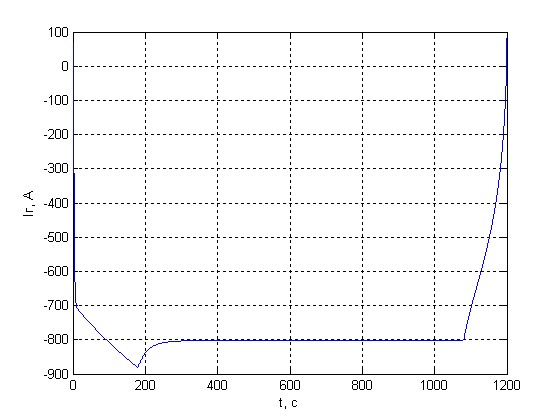
Рисунок 31 – Временная зависимость тока iг
Резкие скачки напряжения приводят к скачкам тока генератора, что является не благополучным аспектом для двигателя. Но это ни как не влияет на скорость и ток двигателя. К схеме на рис.26 был применен блок Situration, для уменьшения напряжения и следовательно тока генератора.
2.2.3 Настройка регулятора по ограничению ошибки
Данный метод настройки основывается на оптимизации переходной характеристики h(t) системы, когда параметры регулятора подбираются такими, чтобы характеристика h(t) вошла в заранее заданные границы. Для системы «двигатель – генератор» вместо переходной характеристики применяются линейно нарастающие сигналы, поэтому оптимизацию h(t) заменим инимизациией динамической ошибки в системе.
Для реализации данного метода применим блок Signal Constraint из пакета Simulink. Схема для минимизации ошибки представлена на рисунке 33.
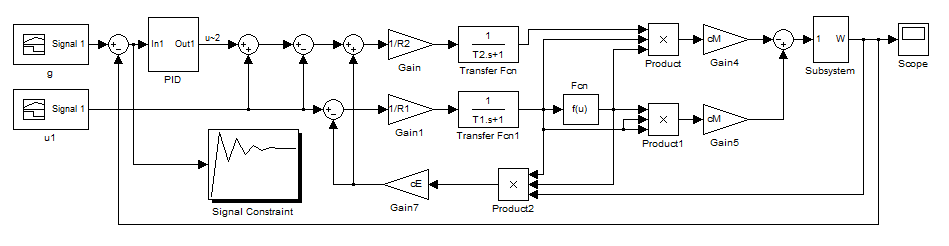
Рисунок 32 – Схема замкнутой системы для минимизации ошибки
ПИД-регулятор здесь имеет ту же структуру, что и на рисунке 21. В настройках блока Signal Constraint выберем в качестве оптимизируемых параметров настроечные параметры ПИД-регулятора и зададим их начальные значения:
kп = –30; kи = –30; kд = –30.
Пределы ошибки зададим от –0,01Ωн до 0,01Ωн или от –0,64 до 0,64 рад/сек.
На рисунке 34 представлен процесс оптимизации параметров ПИД-регулятора.
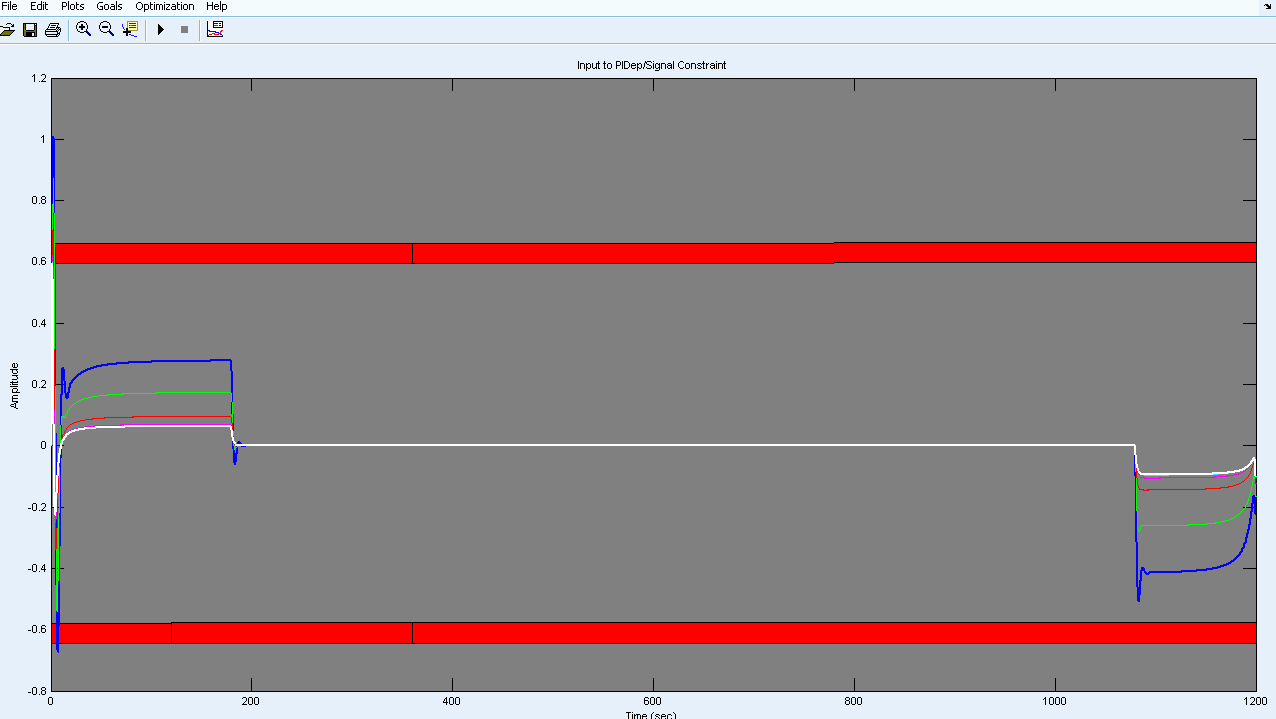
Рисунок 33 – Процесс оптимизации
В результате пяти итераций получен окончательный вид изменения ошибки во времени (рисунок 35) и оптимальные параметры ПИД-регулятора: kп -266.9359; kи = -131.4193; kд = -69.7561
Промоделируем работу системы, используя полученные параметры ПИД-регулятора. Для этого подставим их в регулятор (рисунок 21) модели, представленной на рисунке 20. Временная диаграмма управляющего напряжения u2 для данного случая приведена на рисунке 36, скорости вращения Ω – на рисунке 37, токов iд и iг – на рисунке 38. Управляющее воздействие u1 задано программно, поэтому его вид для всех рассмотренных регуляторов соответствует изображенному на рисунке 8.
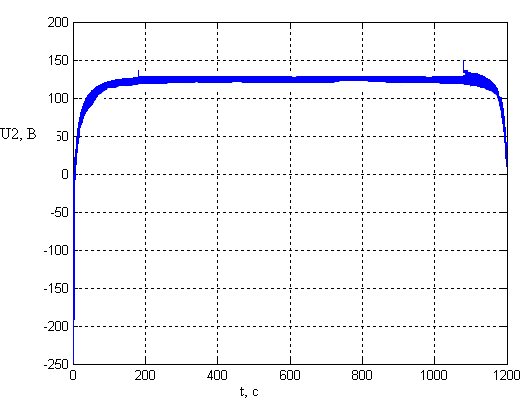
Рисунок 34 – Временная зависимость управляющего напряжения u2
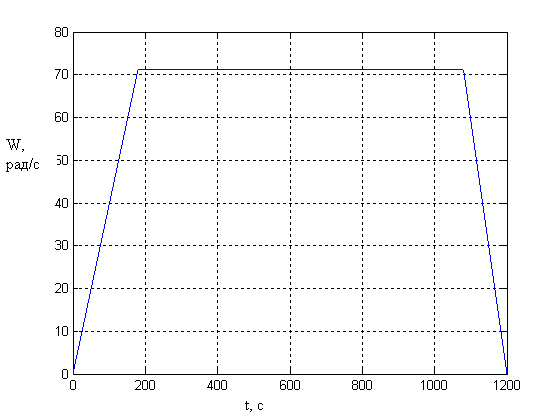
Рисунок 35 – Временная зависимость скорости вращения Ω
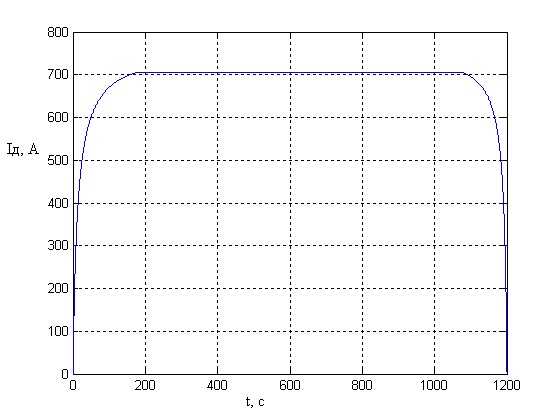
Рисунок 36 – Временные зависимости тока iд
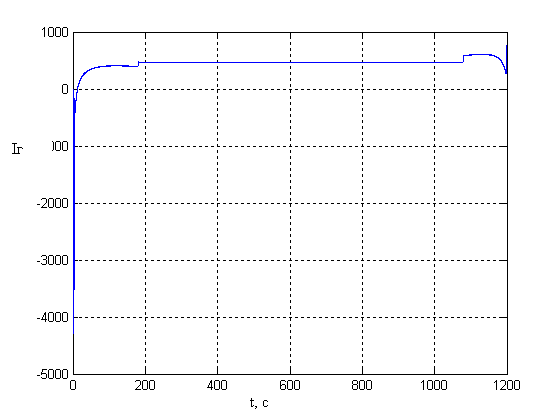
Рисунок 37 – Временные зависимости тока iг