

Министерство транспорта Российской Федерации
Федеральное агентство железнодорожного транспорта
Государственное образовательное учреждение высшего профессионального образования
Омский государственный университет путей сообщения (ОмГУПС)
К ЗАЩИТЕ ДОПУСТИТЬ
_______________А. А. Лаврухин
«___»__________________2012 г.
ПРОЕКТИРОВАНИЕ ЛОКАЛЬНЫХ РЕГУЛЯТОРОВ В
АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ
Пояснительная записка к курсовому проекту по дисциплине «Автоматизированные информационно-управляющие системы»
ИНМВ.520000.000 ПЗ
|
|
Студент гр. 28 И _____________Р. С. Гузов «__»_______________2012 г.
Руководитель ____________А. А. Лаврухин «__»_______________2012 г. |
Омск 2012
Задание
1 Построение модели объекта управления
Вычислить по паспортным данным двигателя необходимые параметры объекта управления − системы «двигатель − генератор» и построить его модель в среде Simulink. Следует учитывать, что при вычислениях размерность всех величин следует переводить в СИ. Паспортные данные электродвигателя приведены в таблице 1.
Таблица 1 – Технические данные тягового двигателя постоянного тока
Параметр |
Значение для варианта №4 |
Наименование двигателя |
AL4846eT |
Номинальное напряжение, В |
1500 |
Номинальная мощность, кВт |
568 |
Частота вращения, об/мин |
600 |
КПД, % |
94,0 |
Сопротивление якорной обмотки, Ом |
0,056 |
Сопротивление обмотки возбуждения, Ом |
0,048 |
Число пар полюсов p |
6 |
Промоделировать работу объекта при программном управлении, построить временные диаграммы управляющих напряжений u1 и u2, скорости вращения и токов iд и iг.
2 Анализ устойчивости
Произвести линеаризацию объекта. Выполнить анализ устойчивости в случаях, когда входными воздействиями являются Mтр и u1. Построить зависимости степеней устойчивости и колебательности от тока в цепи двигателя iд.
3 Синтез регулятора системы управления
Выполнить синтез регулятора замкнутой системы управления корневым методом, исходя из обеспечения заданной степени устойчивости. Промоделировать работу замкнутой системы, построить временные зависимости управляющих напряжений u1и u2, скорости вращения и токов iд и iг.
Построить систему с адаптивным управлением. Промоделировать работу замкнутой системы, построить временные зависимости управляющих напряжений u1 и u2, скорости вращения и токов iд и iг.
Выполнить синтез регулятора замкнутой системы управления путем оптимизации ограничения динамической ошибки. Промоделировать работу замкнутой системы, построить временные зависимости управляющих напряжений u1 и u2, скорости вращения и токов iд и iг.
Сделать обоснованный выбор наилучшего регулятора.
Реферат
УДК 681.51(075.8)
Курсовой проект содержит 39 страниц, 37 рисунков, 2 таблицы, 99 формул, 3 источника.
Автоматизированная система управления, двигатель, генератор, регулятор, устойчивость, скорость вращения, ток, напряжение, динамическая ошибка.
Объектом разработки является регулятор для диагностического стенда испытания тяговых двигателей.
Пояснительная записка выполнена в программе Microsoft Word 2003, расчеты выполнены в среде Matlab, моделирование произведено в пакете Simulink.
Содержание
Введение 4
1 Построение модели объекта автоматизации 6
1.1 Диагностический стенд испытания тяговых двигателей 6
1.2 Динамическая модель объекта 7
1.3 Моделирование при программном управлении 12
1.4 Построение упрощенной линейной модели объекта 16
2.1 Исследование устойчивости линеаризованной системы 19
2.2 Синтез оптимального регулятора системы управления 24
2.2.1 Настройка регулятора корневым методом 24
2.2.2 Адаптивное управление 31
2.2.3 Настройка регулятора по ограничению ошибки 34
Небольшие перепады в напряжении приводят к неощутимым отклонениям тока генератора. Ток двигателя при этом идет стабильно, скорость так же не имеет отклонений. 37
Заключение 38
Введение
Автоматизированные системы, осуществляющие процесс управления с участием человека, представляют большой класс технических систем от простейших диспетчерских пунктов до сложных комплексов управления технологическими агрегатами, цехами и промышленными предприятиями.
Автоматизированные информационно-управляющие системы, которые организуют целенаправленное управление техническими объектами на основе обработки информации, нашли широкое применение в управлении технологическими режимами и процессами (АСУТП), при проведении экспериментальных научных исследований (АСНИ), а также в автоматизированных комплексах контроля и технической диагностики.
По мере развития автоматического управления определились его основные направления: автоматическое регулирование (стабилизация), программное управление, следящие системы, экстремальное регулирование, поисковые системы, оптимальное управление, самонастраивающиеся системы. Однако внедрение автоматических систем управления не позволило исключить человека из контура управления, а тенденции развития общественного производства наоборот усложнили функции, выполняемые человеком. Эти причины, а также появление ЭВМ способствовали быстрому развитию автоматизированного управления, отличительными чертами которого являются автоматизация комплексов процессов или объектов, включение человека в контур управления, информационный и вероятностный подходы к процессу управления, применение ЭВМ как основного технического средства, реализующего функции управления.
Современное автоматизированное управление базируется на теории информации, сложных систем, автоматического управления и принятия решений. Если проектируемая система в основном предназначена для обработки информации, то выделяют информационно-поисковые и информационно-советующие системы, где применяются как простейшие базы данных, так и достаточно сложный математический аппарат интеллектуальных систем. Другим классом являются автоматизированные информационно-управляющие системы (АИУС), когда основными функциями является управление и при синтезе широко применяются известные методы теории сложных систем и автоматического управления.
1 Построение модели объекта автоматизации
1.1 Диагностический стенд испытания тяговых двигателей
Испытания электродвигателей проводятся для проверки пригодности их к работе и для контроля правильности технологического процесса изготовления или ремонта. Существует несколько видов испытаний (приемочные, приемосдаточные, периодические, типовые и на надежность), каждый из которых определен государственным стандартом.
Приемосдаточным испытаниям подвергается каждая электрическая машина, поэтому их объем должен быть ограничен, но в то же время должен гарантировать соответствие электрической машины ее паспортным данным.
Один из методов приемосдаточных испытаний − метод непосредственной нагрузки − может быть реализован тремя способами: без отдачи и с отдачей энергии в сеть, а также путем взаимной нагрузки. Наиболее экономичный способ, при котором используется взаимная нагрузка, применяется при испытаниях тяговых электродвигателей (ТЭД) на диагностическом стенде.
Две одинаковые электрические машины соединяются между собой механически и электрически и подключаются к внешнему источнику энергии. Одна из машин работает в режиме генератора и отдает всю вырабатываемую электрическую энергию другой машине, которая работает в режиме двигателя и расходует всю свою механическую энергию на вращение первой машины. Расход энергии при испытаниях по методу взаимной нагрузки определяется суммарными потерями в обеих машинах. Если учесть, что КПД тяговых электродвигателей превышает 90%, то оказывается, что для испытаний требуется источник мощности, составляющий всего 10 − 20% мощности каждой испытуемой машины, в этом и заключается экономичность метода.
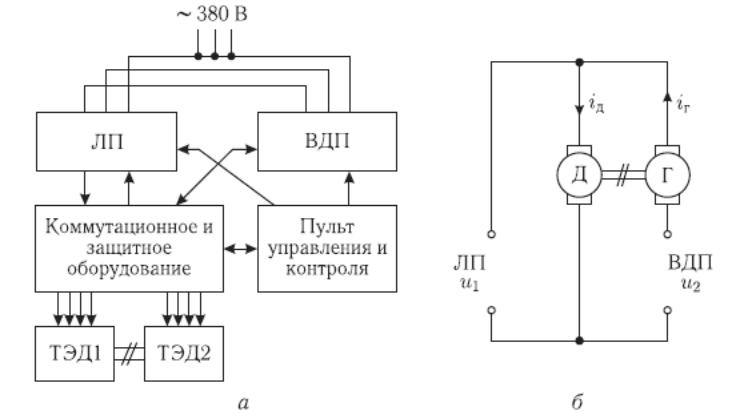
Рисунок 1 – Структурная (а) и принципиальная (б) схемы испытательной станции
Для введения энергии в систему применяется способ параллельного включения источника, когда якорные обмотки машин включаются параллельно и когда подключаемый к ним линейный преобразователь (ЛП) обеспечивает необходимый режим напряжения. Компенсацию электрических потерь выполняет вольтодобавочный преобразователь (ВДП) путем регулирования тока в контуре «двигатель − генератор». Схемы испытательной станции приведены на рисунке 1.
В общем случае возбуждение двигателей может выполняться разными методами, но в связи со спецификой тяговых двигателей (большая мощность, большой пусковой момент) на станции применяется только последовательное возбуждение.