

4. Режим секундомера.
При низком уровне сигнала на входе 3 показания счетчика обнуляются («Сброс»). При высоком уровне сигнала на входе 2 начинается счет времени (формат индикатора: часы.минуты.секунды.сотые доли секунд). При низком уровне сигнала на входе 2 счет приостанавливается и возобновляется при следующем появлении высокого уровня на этом входе. Для ручного управления секундомером вход 2 подключается к тумблеру «Счет – Стоп», а вход 3 – к кнопке «Сброс». Вход 1 в этом режиме не используется.
Параметры конфигурации счетчика импульсов.
Группа GrouP_b. Проверить необходимые установки Strt=0, FinL=-9999999, FinH=9999999.
Группа GrouP_C. Установить:
P=F=ti=1;
inp=6 (счет времени);
ind=3 (вывод на индикатор счетчика времени);
Проверить установки di=0, tc=0, Ftt=0, init=1.
Блок электронагревателя
Блок электронагревателя (рис. 1.5) используется для тестирования датчиков температуры. Блок позволяет задать и автоматически поддерживать температуру нагревателя. В блоке установлен маломощный источник +5 В для питания микросхемы датчика температуры и иных устройств.
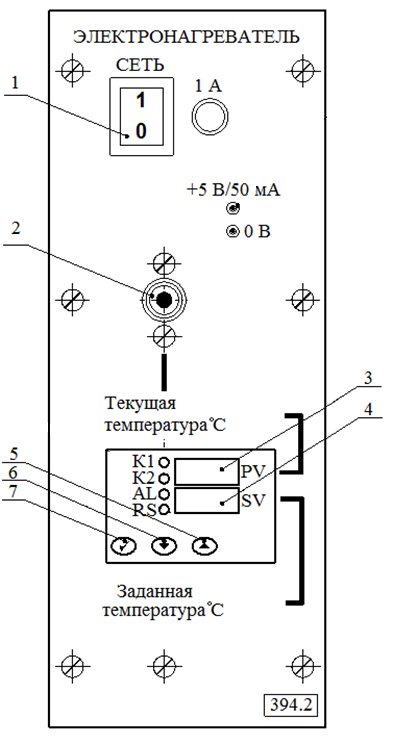
Рис. 1.5. Блок электронагревателя:
1 – выключатель «Сеть»; 2 – гнездо для установки датчика температуры; 3, 4 – индикаторы; 5, 6, 7 – кнопки настройки регулятора температуры
Слева от индикаторов 3 и 4 (рис. 1.5) на лицевой панели регулятора температуры установлены четыре светодиода:
K1 – включен при нагреве;
K2 – не используется;
AL – индикатор превышения предельных значений;
RS – индикатор режима автоматического регулирования, должен быть включен для нормальной работы блока в режиме автоматического регулирования. При выключении автоматического регулирования прибор работает только как индикатор температуры нагревателя.
Подробно режимы работы измерителя-регуля-тора температуры ТР441 и порядок его программирования описаны в [5].
Блок датчика углового положения
Лицевая панель блока датчика углового положения изображена на рис. 1.6.

Рис. 1.6. Блок датчика углового положения:
1 – ручка поворота вала энкодера; 2 – указатель; 3 – шкала угломера; 4 – выводы энкодера; 5 – схема устранения дребезга контактов и определения направления вращения
В блоке А4 установлен механический инкрементный энкодер, имеющий 24 фиксированных положения на оборот, т. е. измерение угла производится с шагом 360/24=15 градусов. Если вал энкодера находится в одном из фиксированных положений, то оба выходных контакта разомкнуты. При повороте вала энкодера на один шаг контакты А и В последовательно замыкаются: при повороте по часовой стрелке контакт А замыкается раньше В, при повороте против часовой стрелки В замыкается раньше А. Импульсы напряжения с замкнутых контактов подсчитываются счетчиком, содержимое которого соответствует полному углу поворота вала энкодера. Поскольку вал энкодера может вращаться в обоих направлениях, для определения угла необходимо использовать реверсивный счетчик, увеличивающий или уменьшающий свое содержимое в зависимости от направления вращения вала.
В блоке испытания датчика углового положения на оси испытываемого энкодера закреплен указатель, для измерения угла поворота вала энкодера по шкале угломера. На гнезда лицевой панели блока выведены контакты энкодера А, В и их общая точка и выводы логической схемы устранения дребезга контактов и разделения импульсов между двумя выходами в зависимости от направления вращения вала.
Блок испытания датчиков скорости вращения
В блоке испытания датчиков скорости вращения А5 (рис. 1.7) установлен электродвигатель постоянного тока 1 (номинальные параметры 24 В, 8000 об/мин), объединенный с тахогенератором. На валу двигателя закреплен кодирующий диск оптического энкодера 2 с 12 зубцами. Зубцы перекрывают световой поток оптронов 3. Так как оптроны расположены на некотором расстоянии, сигналы на их выходах 6 появляются не одновременно и очередность их появления зависит от направления вращения вала двигателя. Это позволяет определять не только скорость, но и направление вращения двигателя.
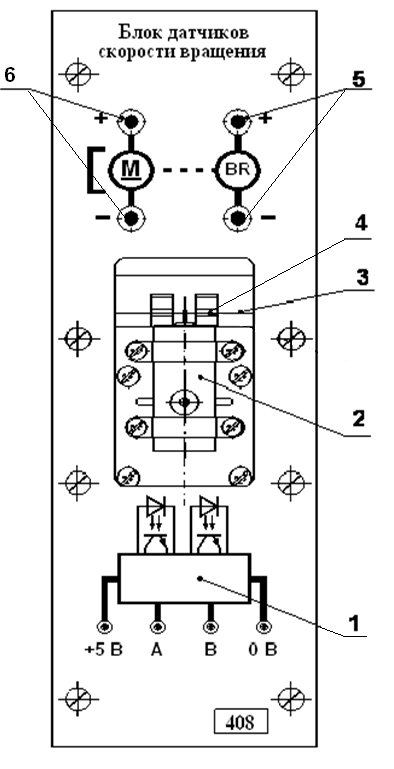
Рис. 1.7. Блок испытания датчиков скорости вращения.
1–двигатель с тахогенератором; 2–кодирующий диск; 3–оптрон; 4–гнезда питания двигателя; 5–выход тахогенератора; 6 – гнезда питания оптронов.
Блок испытания датчика давления
Лицевая панель блока испытания датчика давления А6 (397) приведена на рис. 1.8. В блоке А6 установлены датчик давления MPXV7002PV и водяной манометр для создания и измерения разности давлений.

Рис. 5.1. Блок испытания датчика давления: 1 –датчик давления; 2, 3 – гнезда питания датчика «+5 В», «0 В»; 4 – гнездо выходного напряжения датчика (относительно 0 В); 5 – трубка водяного манометра; 6 – линейки для измерения разности уровней воды в трубках манометра; 7, 8 – зажимы трубок манометра