

1.2.2 Вентиляционные установки
Центробежные вентиляторы являются основным элементом различных вентиляционных установок.
Они обеспечивают технологический процесс производства (подача газа в рабочие объемы) и условия трудовой деятельности (кондиционеры, общецеховая система вентиляции).
Вентиляционные установки достаточно просто поддаются автоматизации по сигналам изменения режима и реагируют на них без участия обслуживающего персонала путем переключения в схемах управления.
Это позволяет задачи обслуживающего персонала свести к периодическому контролю за установками и плановой профилактике.
Основным параметром регулирования таких установок, на который надо воздействовать, является угловая скорость приводного электродвигателя.
1.2.3 Мостовой кран
Краны - это грузоподъемные устройства для вертикального и горизонтального перемещения грузов на небольшие расстояния. Однотипными узлами всех кранов являются:
1. Механизм передвижения моста.
Передвижение моста (несущей конструкции) осуществляется по рельсам подкранового пути, вдоль пролета цеха.
Кинематическая схема механизма передвижения представлена на рис. 4.
Г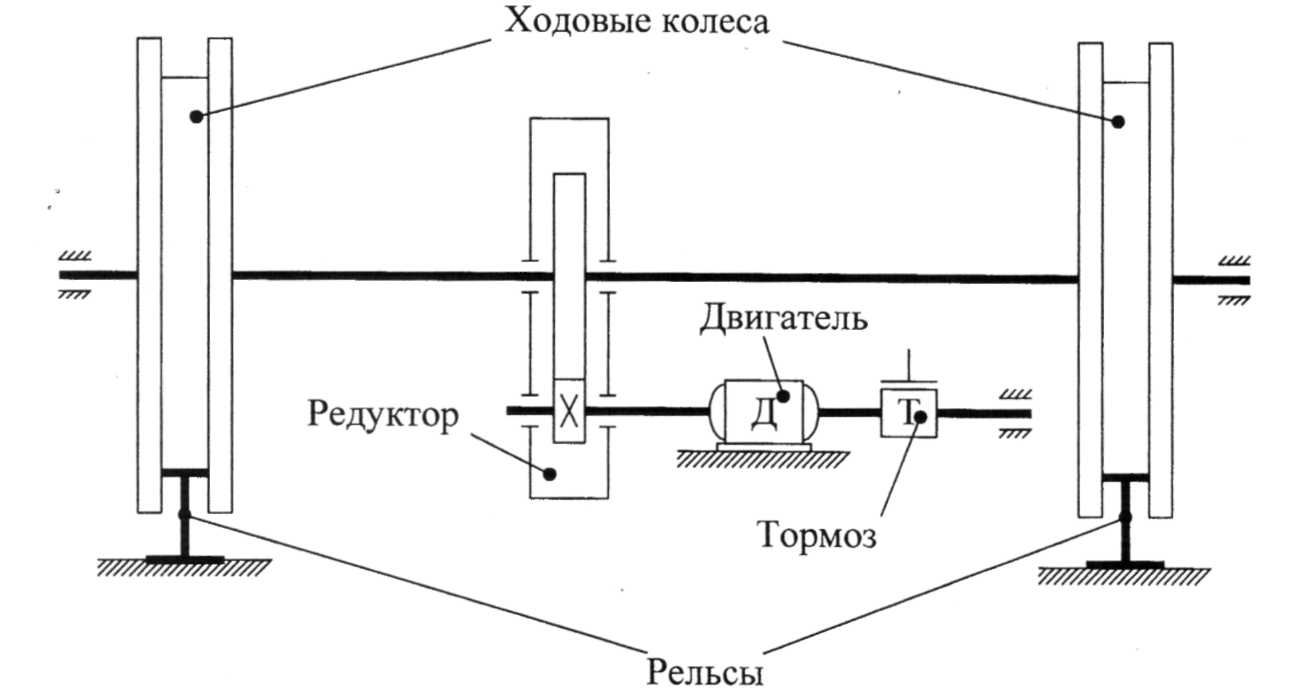 лавные
балки коробчатого сечения или в виде
решетчатых ферм расположены по ширине
пролета цеха и скреплены концевыми
балками.
лавные
балки коробчатого сечения или в виде
решетчатых ферм расположены по ширине
пролета цеха и скреплены концевыми
балками.
Рис.4. Кинематическая схема механизма передвижения моста с общим приводом колес.
К концевым балкам устанавливаются ходовые колеса, которые движутся по рельсам.
Привод колес от электродвигателя с тормозом через редуктор может быть раздельным или общим. Скорость передвижения моста номинальная - от 2.0 до 2.3 м/с.
2. Механизм передвижения тележки.
Передвижение тележки осуществляется вдоль моста по проложенным рельсам на 4 ходовых колесах.
Кинематическая схема механизма передвижения тележки представлена на рис.5.
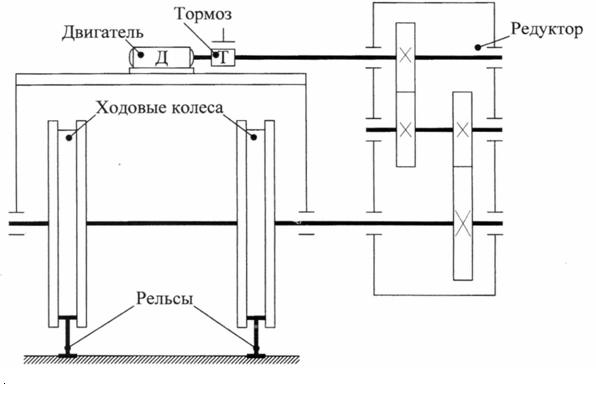
Рис.5. Кинематическая схема механизма передвижения тележки
Привод колесной пары от электродвигателя с электромагнитным тормозом через редуктор. Колеса передвигаются по рельсам. На тележке установлена лебедка подъемная для груза. Скорость передвижения тележки номинальная - от 0.65 до 1.0 м/с.
3. Механизм подъема.
Механизм подъема представляет собой подъемную лебедку барабанного типа.
Кинематическая схема механизма подъема представлена на рис.6.
Барабан лебедки с намотанным на него канатом приводится во вращение двигателем с тормозом через редуктор.
К канату крепится грузозахватывающее устройство - крюк. Для механизмов подъема наибольшее применение получили полиспасты, которые передают движение от барабана к крюку.
Среди грузозахватывающих устройств чаще всего применяются крюк или электромагнит.
По грузоподъемности мостовые краны условно делятся на малые (от 5 до Ют.), средние (от 10 до 20т.) и крупные (более 50т).
На тележках мостового крана грузоподъемностью более 15т. устанавливается 2 механизма подъема: главный и вспомогательный.
П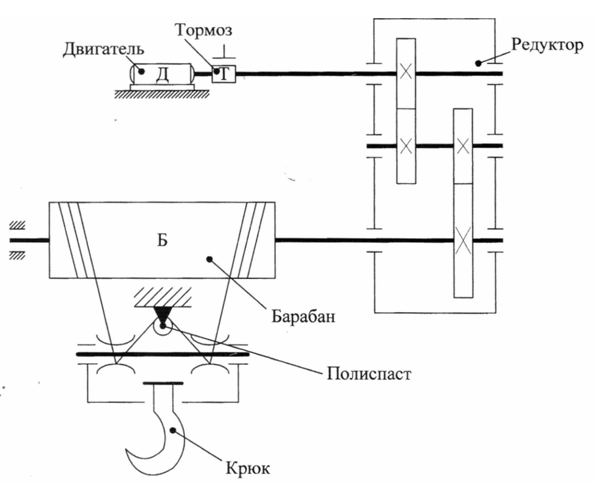 одвод
электропитания - от главных троллеев,
уложенных вдоль подкранового пути, по
скользящим токосъемникам. Питание
грузозахватывающего устройства
осуществляется гибким кабелем.
одвод
электропитания - от главных троллеев,
уложенных вдоль подкранового пути, по
скользящим токосъемникам. Питание
грузозахватывающего устройства
осуществляется гибким кабелем.
Рис. 6. Кинематическая схема механизма подъема.
Управление механизмами крана из кабины оператора-крановщика, в которой установлены контроллеры и командокон-троллеры. Аппаратура управления и резисторы расположены на мосту.