

Properties
Properties of the z-transform |
||||
|
Time domain |
Z-domain |
Proof |
ROC |
Notation |
|
|
|
ROC:
|
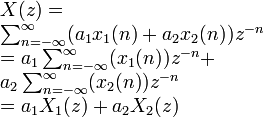
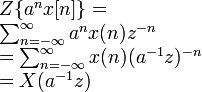
Linearity |
|
|
|
At least the intersection of ROC1 and ROC2 |
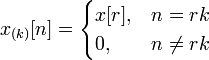
Time expansion |
|
|
|
R^{1/k} |
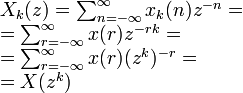
Time shifting |
|
|
|
ROC, except
|
Scaling in the z-domain |
|
|
|
|
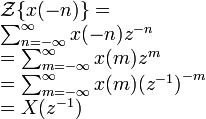
Time reversal |
|
|
|
|
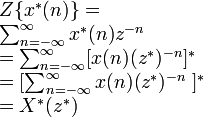
Complex conjugation |
|
|
|
ROC |
Real part |
|
|
|
ROC |
Imaginary part |
|
|
|
ROC |
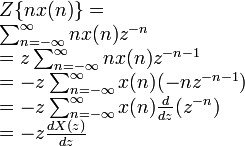
Differentiation |
|
|
|
ROC |
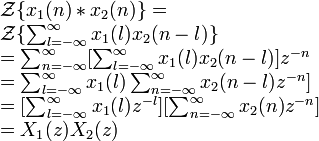
Convolution |
|
|
|
At least the intersection of ROC1 and ROC2 |
Cross-correlation |
|
|
|
At least the intersection of ROC of
|
First difference |
|
|
|
At least the intersection of ROC of X1(z)
and
|
Accumulation |
|
|
|
|
Multiplication |
|
|
|
- |
Parseval's relation |
|
|
|
|
Initial value theorem
![]() ,
If
causal
,
If
causal
Final value theorem
![]() ,
Only if poles of
,
Only if poles of
![]() are
inside the unit circle
are
inside the unit circle
Table of common z-transform pairs
Here:
|
Signal, |
Z-transform, |
ROC |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
|
8 |
|
|
|
9 |
|
|
|
10 |
|
|
|
11 |
|
|
|
12 |
|
|
|
13 |
|
|
|
14 |
|
|
|
15 |
|
|
|
16 |
|
|
|
17 |
|
|
|
18 |
|
|
|
19 |
|
|
|
20 |
|
|
|
21 |
|
|
|
Relationship to Laplace transform
The Bilinear transform is a useful approximation for converting continuous time filters (represented in Laplace space) into discrete time filters (represented in z space), and vice versa. To do this, you can use the following substitutions in H(s) or H(z):
![]()
from Laplace to z (Tustin transformation), or
![]()
from
z to Laplace. Through the bilinear transformation, the complex
s-plane (of the Laplace transform) is mapped to the complex z-plane
(of the z-transform). While this mapping is (necessarily) nonlinear,
it is useful in that it maps the entire
![]() axis
of the s-plane onto the unit
circle in the z-plane. As such,
the Fourier transform (which is the Laplace transform evaluated on
the
axis)
becomes the discrete-time Fourier transform. This assumes that the
Fourier transform exists; i.e., that the
axis
is in the region of convergence of the Laplace transform.
axis
of the s-plane onto the unit
circle in the z-plane. As such,
the Fourier transform (which is the Laplace transform evaluated on
the
axis)
becomes the discrete-time Fourier transform. This assumes that the
Fourier transform exists; i.e., that the
axis
is in the region of convergence of the Laplace transform.