

Режим перезапуска
Режим перезапуска активируется с помощью панели оператора. Для этого выполните следующие шаги:
Индикатор кнопки RESET мигает – это значит, что идет запрос на перезапуск.
Нажмите кнопку RESET в течение, приблизительно 2 сек.
Робот производит перемещение в исходную позицию.
После достижения исходного состояния комплекса индикатор кнопки RESET горит постоянно.
Переведите переключатель Auto/Man в положение Auto.
Режим автоматической работы
Для запуска автоматического режима работы следует выполнить следующее:
Предварительно должна быть проведена подготовка к запуску комплекса.
Индикатор кнопки RESET горит постоянно, индикатор кнопки START мигает – это значит, что идет запрос на запуск комплекса.
Нажмите кнопку START в течение приблизительно 2 сек – начнется автоматическая работа комплекса.
Автоматический режим работы будет отображаться непрерывно горящими индикаторами кнопок START и RESET.
Конвейер комплекса начинает работу с заготовками. Конвейер служит в роли буфера заготовок, накапливая их в очередь и выдавая по одной в зону захвата роботом. Робот захватывает заготовку и после того как откроется защитный экран станка, устанавливает ее в патрон. Затем начинается обработка заготовки в автоматическом режиме. После этого обработанная заготовка извлекается из патрона станка и устанавливается на второй конвейер. Если эта заготовка переместилась до конца конвейера, то начинается новый цикл работы комплекса. Если второй конвейер уже полностью занят заготовками (активен его датчик), то загорается индикатор Q1 и подача заготовок будет остановлена до тех пор, пока на конвейере не появится свободное место
Для остановки автоматического режима работы следует выполнить следующее:
Индикатор кнопки START горит непрерывно и идет автоматический режим работы.
Нажмите кнопку STOP
Активное состояние комплекса будет отображено загоревшимся индикатором кнопки RESET.
Текущий цикл устанавливается окончательным.
После окончания цикла комплекс перейдет в режим ожидания повторного запуска.
3. Робот rv-1a
Робот используется для перемещения заготовок внутри комплекса. Он оснащен пневматическим захватом и имеет 6 осей позиционирования. Схема его сборки представлена на рис. 5.

Рисунок 5. Схема подключения робота
Общий вид робота представлен на рис. 6. Его технические характеристики приведены в табл. 2. Робот может осуществлять позиционирование в нескольких системах координат, представленных на
рис. 7, рис.8 и рис. 9.

Рисунок 6. Общий вид робота RV-1A
Таблица 2. Параметры робота RV-1A
Параметр |
Ед. изм. |
Величина |
||
Число степеней свободы |
|
6 |
||
Привода |
|
Асинхронные сервоприводы J1-J3 50 Вт, J4-J6 Вт. |
||
Оси с наличием тормоза |
|
J1, J2, J3, J5 |
||
Рабочая область |
J1 |
Градусы |
300 (от -150 до +150) |
|
J2 |
180 (от -60 до +120) |
|||
J3 |
95 (от +60 до +155) |
|||
J4 |
320 (от -160 до +160) |
|||
J5 |
180 (от -90 до +90) |
|||
J6 |
400 (от -200 до +200) |
|||
Скорость перемещения |
J1 |
Градусы/сек. |
180 |
|
J2 |
90 |
|||
J3 |
135 |
|||
J4 |
180 |
|||
J5 |
180 |
|||
J6 |
210 |
|||
Максимальная скорость |
мм/сек. |
2200 |
||
Нагрузка |
Максимальная |
кг |
1,5 |
|
Номинальная |
1 |
|||
Точность позиционирования |
мм |
±0,02 |
||
Допустимый момент на оси |
J4 |
Н*м |
1,44 |
|
J5 |
1,44 |
|||
J6 |
0,73 |
|||
Максимальный радиус работы |
мм |
418 |
||
Рабочее давление воздуха |
МПа |
0,5±10% |
||
Входы |
|
48 |
||
Выходы |
|
48 |
||
Масса |
кг |
19 |
||
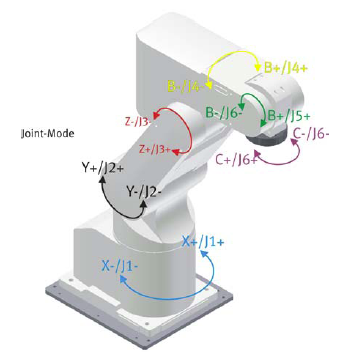
Рисунок 7. Система координат по каждой из осей (JOINT).
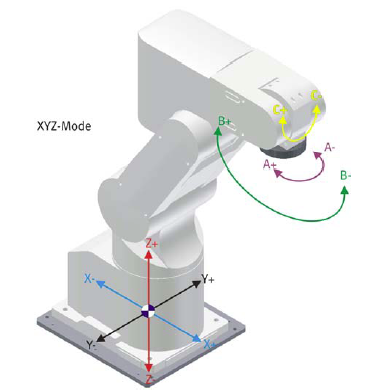
Рисунок 8. Система координат XYZ.
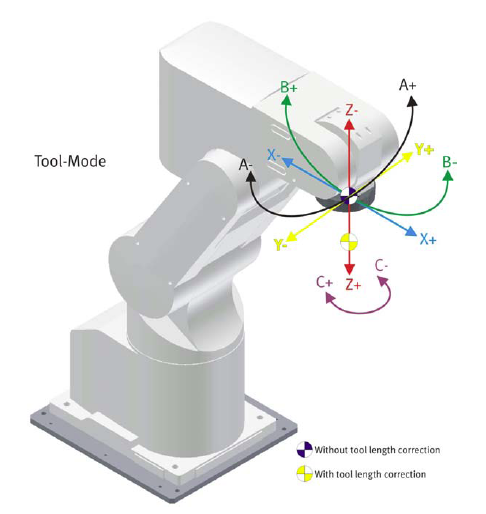
Рисунок 9. Система координат по захвату (TOOL).