

71. Основные показатели, характеризующие регулируемый электропривод. Частотно-регулируемый электропривод.
Под регулируемым электроприводом понимается электропривод, обеспечивающий плавное с необходимой точностью регулирование скорости (или момента) в заданном диапазоне. Однако требования к регулируемому электроприводу этим не ограничиваются. Система управления регулируемого электропривода должна обеспечить также заданный характер переходных процессов при изменении скорости, момента или других параметров электропривода.
Поскольку по своим электромеханическим свойствам электродвигатели в естественной схеме включения в питающую сеть не могут обеспечить регулирование параметров движения электропривода с нужным качеством, для создания регулируемого электропривода приходится преобразовывать электрическую энергию, подводимую к (или отводимую от) двигателю. Преобразование электрической энергии осуществляется посредством полупроводниковых преобразователей.
Регулируя параметры преобразованной электрической энергии (частоту, напряжения, форму и длительность импульсов и др.) удается получить требуемые для регулируемого привода механические и динамические характеристики. Для управления параметрами (напряжение, частота и др.) полупроводниковых преобразователей, входящих в состав регулируемого электропривода, служат внутренние контуры автоматического регулирования – это регуляторы тока, э.д.с., тока возбуждения и др. В этом смысле регулируемый электропривод всегда является автоматизированным, т.к. содержит средства автоматизированного управления, формирующие характеристики электропривода.
В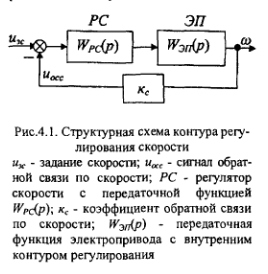 нешние
контуры регулирования определяют
переменные, характеризующие движения
электропривода: скорость или положение
рабочего органа. Обычно эти контуры
регулирования являются замкнутыми,
т.е. содержат отрицательную обратную
связь по регулируемому параметру и
соответствующий регулятор.
нешние
контуры регулирования определяют
переменные, характеризующие движения
электропривода: скорость или положение
рабочего органа. Обычно эти контуры
регулирования являются замкнутыми,
т.е. содержат отрицательную обратную
связь по регулируемому параметру и
соответствующий регулятор.
Задание на скорость Uзс может формироваться вручную или автоматически. Передаточная функция регулятора скорости Wpc(p) выбирается такой, чтобы обеспечить требуемое качество регулирования по статическим (диапазон, точность) и по динамическим показателям (быстродействие, перерегулирование, колебательность).
Двигатели, полупроводниковые преобразователи электрической энергии, датчики и устройства автоматического регулирования в своей совокупности образуют систему регулируемого электропривода. Эти системы различают, прежде всего по виду приводного электродвигателя, а также по виду используемых полупроводниковых преобразователей электрической энергии, питающих двигатель.
Регулирование скорости – это принудительное посредством системы управления изменение скорости, исходя из требований технологического процесса. Такое регулирование производится при подаче на вход системы регулирования управляющего воздействия. Однако регулирование скорости может производится и при неизменном управляющем воздействии, когда задача регулирования заключается в стабилизации скорости при появлении возмещающих воздействий, например при изменении нагрузки, прикладываемой к валу электродвигателя.
Частотно-регулируемый привод — система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. Состоит из собственно электродвигателя и частотного преобразователя.
Частотный преобразователь (преобразователь частоты) — это устройство состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемых частоты и амплитуды. Выходные тиристоры (GTO) или транзисторы IGBT обеспечивают необходимый ток для питания электродвигателя. Для исключения перегрузки преобразователя при большой длине фидера между преобразователем ифидером ставят дроссели, а для уменьшения электромагнитных помех — EMC-фильтр.
При скалярном управлении формируются гармонические токи фаз двигателя. Векторное управление — метод управления синхронными иасинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз, но и обеспечивающим управление магнитным потоком ротора (моментом на валу двигателя).
ЧРП применяются в:
судовом электроприводе большой мощности
прокатных станах (синхронная работа клетей)
высокооборотном приводе вакуумных турбомолекулярных насосов (до 100.000 об/мин.)
конвейерных системах
резательных автоматах
станках с ЧПУ — синхронизация движения сразу нескольких осей (до 32 — например в полиграфическом или упаковывающем оборудовании) (сервоприводы)
автоматически открывающихся дверях
мешалках, насосах, вентиляторах, компрессорах
стиральных машинах
бытовых инверторных сплит-системах
на электротранспорте: электровозах, электропоездах, трамваях и троллейбусах
в текстильной промышленности ( для поддержания постоянной скорости и натяжения ткани между различными узлами машины)
в системах позиционирования
Наибольший экономический эффект даёт применение ЧРП в системах вентиляции, кондиционирования и водоснабжения, где применение ЧРП стало фактически стандартом.[источник не указан 436 дней]