

Решение систем оду в одной заданной точке
Достаточно часто при решении дифференциальных уравнений требуется определить значения искомых функций не на всём интервале (t0,t1), а только в последней его точке. Весьма распространены задачи поиска аттракторов динамических систем. Известно, что одна и та же система при разных начальных условиях при t∞ приходит в одну и ту же точку (аттрактор). Поэтому нужно определить эту точку.
Для решения этой задачи в Mathcad имеются модификации встроенных функций Rkadapt и Bulstoer. Они имеют другой набор параметров и работают быстрее своих аналогов.
Rkadapt(y0,t0,t1,acc,D,k,s)-метод Рунге-Кутта с переменным шагом;
Bulstoer(y0,t0,t1,acc,D,k,s)-метод Булирша-Штера:
y0-вектор начальных значений в точке t0;
t0,t1-начальная и конечная точки расчёта;
acc-погрешность вычисления;
D-векторная функция, задающая систему ОДУ;
K-максимальное число шагов, на которых численный метод будет находить решение;
S-минимально допустимая величина шага.
Пример:
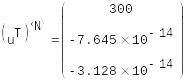
Поиск аттрактора системы двух ОДУ модели осциллятора.
В первых двух строках определяется система уравнений и начальные условия; в следующей строке матрице u присваивается решение, полученное с помощью bulstoer.
В четвёртой строке определяем количество шагов, далее осуществлен вывод решения системы .
![]()
![]()
![]()
Жёсткие системы оду
Жесткие системы - это те уравнения, решение которых получить намного проще с помощью определенных неявных методов, чем с помощью явных методов.
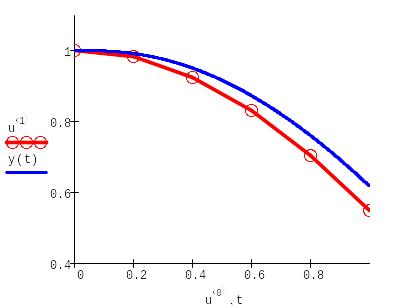
Раccмотрим пример нежёсткого уравнения, решение которого получаем методом Рунге-Кутта.
![]()
![]()
![]()

Изменим коэффициент на -50:
![]()

Разброс решения говорит о неустойчивости алгоритма. Первое, что можно сделать, - увеличить количество шагов в методе Рунге-Кутта.
М ожно убедиться, что при step>20 разболтка пропадает, и решение становится похожим на график с коэффициентом -10.
![]()

Таким образом, во-первых, мы выяснили, что одни и те же уравнения (с разными параметрами) могут быть как жесткими, так и нежесткими.
Во-вторых, чем жестче уравнение, тем больше шагов в обычных численных методах требуется для его устойчивого решения.
Решение жёстких систем дифференциальных уравнений можно осуществить только с помощью встроенных функций:
Radau(y0,t0,t1,M,F)-алгоритм RADAUS для жёстких систем;
Stiffb(y0,t0,t1,M,F,J) –алгоритм Булирша-Штера для жёстких систем ОДУ;
Stiffr(y0,t0,t1,M,F,J) –алгоритм Розенброка для жёстких систем ОДУ;
Y0-вектор начальных значений в точке t0;
t0,t1-начальная и конечная точка расчёта;
M-число шагов численного метода;
F-векторная функция F(t,y) размера 1xN, задающая систему ОДУ.
J-матричная функция J(t,y) размера (N+1)xN , составленная из вектора производных функции F(t,y) по t.
Пример:
Рассмотрим предыдущую функцию, только с коэффициентом -100.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Существуют встроенные функции, которые применяются для решения жёстких систем ОДУ не на всём интервале, а только в заданной точке t1.
Radau(y0,t0,t1,acc,F,k,s)-алгоритм RADAUS;
Stiffb(y0,t0,t1,acc,F,J,k,s) –алгоритм Булирша-Штера ;
Stiffr(y0,t0,t1,acc,F,J,k,s) –алгоритм Розенброка ;