

11. Прибыль и рентабельность. Пути их повышения.
Прибыль — разница между доходами (выручки от реализации товаров и услуг) и затратами на производство или приобретение и сбыт этих товаров и услуг.
Рентабельность продукции — отношение (чистой) прибыли к полной себестоимости.
Несмотря на многие недостатки, многие компании в настоящее время стараются планировать свою деятельность, благодаря чему они могут адекватно оценивать свои расходы и доходы.
Одним из методов повышения прибыльности и рентабельности компании является снижение расходов, связанных с производством продукции.
Еще одним путем повышения прибыли и рентабельности компании может стать кадровая политика предприятия. В настоящее время многие предприниматели предпочитают нанимать высококвалифицированных специалистов, которые могут работать на нескольких должностях, кроме того, различные компании применяют все более совершенные методы стимулирования труда, а также направляют своих работников на курсы переподготовки.
Также в последнее время все чаще отечественные предприниматели стремятся ввести более совершенную механизацию труда, которая позволяет получить качественный продукт при небольших издержках.
Одним из путей повышения прибыли также является экономия электроэнергии при работе энергоемких производств, а также более тщательно разработанная технология, которая позволяет существенно снизить брак при производстве.
Также пути повышения прибыли и рентабельности подразумевают увеличение продаж готовой продукции, которое может быть достигнуто несколькими способами. В настоящее время все больше компаний уделяют повышенное вниманию маркетингу, что позволяет им не только выбирать товары, которые представляют интерес для потребителей, но и продвигать их на рынок.
В некоторых случаях предприятия обращаются в консалтинговые агентства, которые оказывают услуги по оценке коммерческой деятельности компании, а также дают рекомендации по различным путям повышения прибыли и рентабельности компании.
12. Сможет ли двигатель работать длительно с моментом сопротивления равным 1,4 ном. Ответ обосновать.
Нет, так как при такой длительной нагрузке двигатель нагреется выше рабочей температуры, что приведёт к износу и выходу из строя его составных частей. При изготовлении двигатель рассчитывается из соображений, что он способен нагреться до максимальной температуры, работая при моменте 1,3 номинального 30 минут.
13. Алгебраические критерии устойчивости сау.
Алгебраические критерии основываются на утверждении, что если все корни характеристического уравнения левые (вещественные части всех корней отрицательны), то все коэффициенты уравнения имеют один знак, т.е. все значения an либо больше нуля, либо меньше нуля одновременно. Это является необходимым условием. АК применяются там, где необходимо просто установить - устойчива САУ или нет, без определения порядка устойчивости. Применяется при составлении алгоритмов программ.
Критерий
Гурвица. Метод работает
с коэффициентами характеристического
уравнения системы. Пусть ![]() — передаточная
функция системы, а
— передаточная
функция системы, а ![]() —
характеристическое уравнение системы.
Представим характеристический полином
—
характеристическое уравнение системы.
Представим характеристический полином ![]() в
виде
в
виде
![]()
Из коэффициентов
характеристического уравнения
строится определитель Гурвица ![]() по алгоритму:
по алгоритму:
1) по главной
диагонали слева направо выставляются
все коэффициенты характеристического
уравнения от ![]() до
до ![]() ;
;
2) от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так, чтобы индексы убывали сверху вниз;
3) на место коэффициентов с индексами меньше нуля или больше ставятся нули.
Для того, чтобы динамическая система была устойчива, необходимо и достаточно, чтобы все диагональных миноров определителя Гурвица были положительны.
Критерий Рауса. Метод работает с коэффициентами характеристического уравнения системы. Пусть — передаточная функция системы, а — характеристическое уравнение системы. Представим характеристический полином в виде
Критерий Рауса представляет собой алгоритм, по которому составляется специальная таблица, в которой записываются коэффициенты характеристического полинома таким образом, что:
в первой строке записываются коэффициенты уравнения с чётными индексами в порядке их возрастания
во второй строке — с нечётными
остальные
элементы таблицы определяются по
формуле: ![]() ,
где
,
где ![]() —
номер строки,
—
номер строки, ![]() —
номер столбца
—
номер столбца
число строк таблицы Рауса на единицу больше порядка характеристического уравнения
Для устойчивости линейной стационарной системы необходимо и достаточно, чтобы коэффициенты первого столбца таблицы Рауса были одного знака. Если это не выполняется, то система неустойчива.
14. Т-триггер, Д- триггер, JK-триггер. Временные диаграммы.
Триггер — класс электронных устройств, обладающих способностью длительно находиться в одном из двух устойчивых состояний и чередовать их под воздействием внешних сигналов. По характеру действия триггеры относятся к импульсным устройствам — их активные элементы работают в ключевом режиме, а смена состояний длится очень короткое время.
О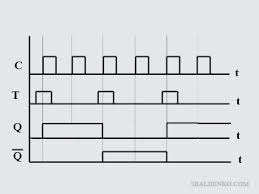 тличительной
особенностью триггера как функционального
устройства является свойство запоминания
двоичной информации. Под памятью триггера
подразумевают способность оставаться
в одном из двух состояний и после
прекращения действия переключающего
сигнала. Приняв одно из состояний за
«1», а другое за «0», можно считать, что
триггер хранит (помнит) один разряд
числа,
записанного в двоичном коде.
тличительной
особенностью триггера как функционального
устройства является свойство запоминания
двоичной информации. Под памятью триггера
подразумевают способность оставаться
в одном из двух состояний и после
прекращения действия переключающего
сигнала. Приняв одно из состояний за
«1», а другое за «0», можно считать, что
триггер хранит (помнит) один разряд
числа,
записанного в двоичном коде.
Т триггер
T |
Q(t) |
Q(t+1) |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
 инхронный Т-триггер,
при единице на входе Т,
по каждому такту на входе С изменяет
своё логическое состояние на
противоположное, и не изменяет выходное
состояние при нуле на входе T.
Т-триггер можно построить на JK-триггере,
каждый раз одновременно подавая на
входы J и K логическую
1.
инхронный Т-триггер,
при единице на входе Т,
по каждому такту на входе С изменяет
своё логическое состояние на
противоположное, и не изменяет выходное
состояние при нуле на входе T.
Т-триггер можно построить на JK-триггере,
каждый раз одновременно подавая на
входы J и K логическую
1.
D -триггер
-триггер
D |
Q(t) |
Q(t+1) |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
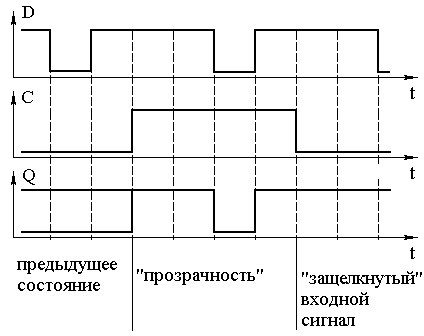
D-триггер — запоминает состояние входа и выдаёт его на выход. D-триггеры имеют, как минимум, два входа: информационный D и синхронизации С. После прихода активного фронта импульса синхронизации на вход С D-триггер открывается. Сохранение информации в D-триггерах происходит после спада импульса синхронизации С. Так как информация на выходе остаётся неизменной до прихода очередного импульса синхронизации, D-триггер называют также триггером с запоминанием информации или триггером-защёлкой.
J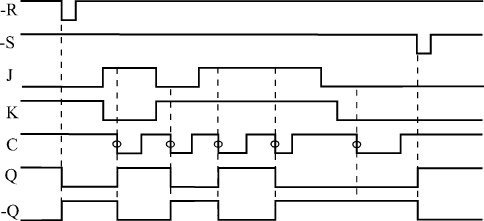
 K-триггер
работает
так же как RS-триггер, с одним лишь
исключением: при подаче логической
единицы на оба входа J и K состояние
выхода триггера изменяется на
противоположное. Вход J (от англ. Jump —
прыжок) аналогичен входу S у
RS-триггера. Вход K (от англ. Kill —
убить) аналогичен входу R у
RS-триггера. При подаче единицы на вход J и
нуля на вход K выходное
состояние триггера становится равным
логической единице. А при подаче единицы
на вход K и
нуля на вход J выходное
состояние триггера становится равным
логическому нулю. JK-триггер в отличие
от RS-триггера не имеет запрещённых
состояний на основных входах, однако
это никак не помогает при нарушении
правил разработки логических схем.
K-триггер
работает
так же как RS-триггер, с одним лишь
исключением: при подаче логической
единицы на оба входа J и K состояние
выхода триггера изменяется на
противоположное. Вход J (от англ. Jump —
прыжок) аналогичен входу S у
RS-триггера. Вход K (от англ. Kill —
убить) аналогичен входу R у
RS-триггера. При подаче единицы на вход J и
нуля на вход K выходное
состояние триггера становится равным
логической единице. А при подаче единицы
на вход K и
нуля на вход J выходное
состояние триггера становится равным
логическому нулю. JK-триггер в отличие
от RS-триггера не имеет запрещённых
состояний на основных входах, однако
это никак не помогает при нарушении
правил разработки логических схем.
J |
K |
Q(t) |
Q(t+1) |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |