

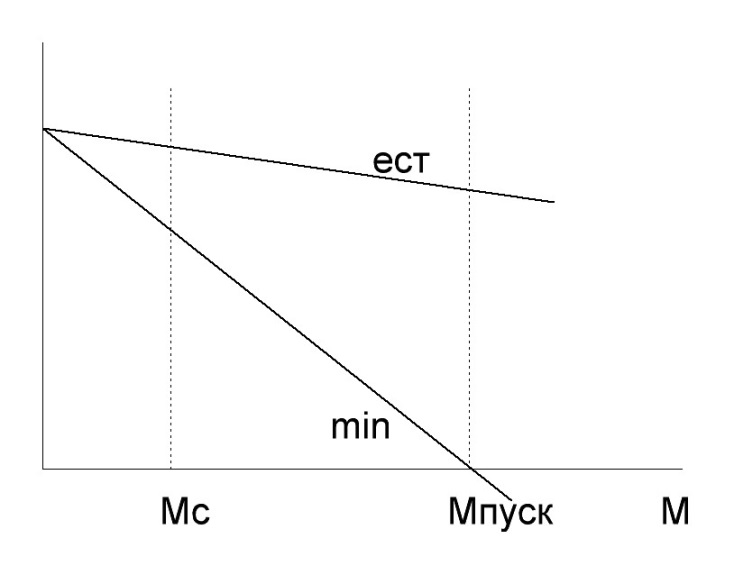
7. Определение диапазона регулирования скорости данного привода при реостатном способе управления.
Диапазон регулирования скорости при вращательном движении максимальной (МАХ) и минимальной (МИН) угловыми скоростями изделия (шпинделя): D = МАХ/МИН; при поступательном движении максимальной (VMAX) и минимальной (VMИН) линейными скоростями движения: D = VMAX/ VMИН; при поступательном движении подачи максимальной (SMAX) и минимальной (SMИН) подачами: D = SMAX/ SMИН.
Плавность регулирования скорости – это отношение двух соседних значений скорости:
= i/i-1, где i , i-1 – соответственно скорость на i и i –1-й ступенях регулирования. Она определяется коэффициентом регулирования, который выбирают как коэффициент геометрического ряда скоростей: = Z-1 D, где z – число фиксированных значений скоростей, z-1 – число интервалов между значениями скорости.
8. Критерии устойчивости САУ. Краткая характеристика. Области применения. (=20=25)
Алгебраические критерии основываются на утверждении, что если все корни характеристического уравнения левые (вещественные части всех корней отрицательны), то все коэффициенты уравнения имеют один знак, т.е. все значения an либо больше нуля, либо меньше нуля одновременно. Это является необходимым условием. АК применяются там, где необходимо просто установить - устойчива САУ или нет, без определения порядка устойчивости. Применяется при составлении алгоритмов программ.
Критерий
Гурвица. Для того, чтобы динамическая
система была устойчива, необходимо и
достаточно, чтобы
все ![]() диагональных миноров определителя Гурвица
были положительны.
диагональных миноров определителя Гурвица
были положительны.
Критерий
Рауса. Для устойчивости линейной
стационарной системы необходимо и
достаточно, чтобы коэффициенты первого
столбца таблицы Рауса ![]() были
одного знака. Если это не выполняется,
то система неустойчива.
были
одного знака. Если это не выполняется,
то система неустойчива.
Частотные
критерии устойчивости основаны на
связи расположения корней характеристического
полинома с годографом этого полинома
на комплексной плоскости, т.е. с графиком
комплексной функции D(jw) при изменении
w от 0 до ∞. По принципу аргумента Коши:
контур ![]() ,
охватывающий на
,
охватывающий на ![]() -плоскости
некоторое число неаналитических точек,
может быть отображён на другую комплексную
плоскость (плоскость
-плоскости
некоторое число неаналитических точек,
может быть отображён на другую комплексную
плоскость (плоскость ![]() )
при помощи функции
таким
образом, что получившийся контур
)
при помощи функции
таким
образом, что получившийся контур ![]() будет
охватывать центр
будет
охватывать центр ![]() -плоскости
раз,
причём
-плоскости
раз,
причём ![]() ,
где
,
где ![]() —
число нулей, а
—
число нулей, а ![]() —
число полюсов функции
Критерии используется для определения
степени устойчивости, а также путей
приведения САУ к устойчивому состоянию
ввиду своей наглядности, а также
отсутствию необходимости вычисления
полюсов передаточной функции замкнутой
системы.
—
число полюсов функции
Критерии используется для определения
степени устойчивости, а также путей
приведения САУ к устойчивому состоянию
ввиду своей наглядности, а также
отсутствию необходимости вычисления
полюсов передаточной функции замкнутой
системы.
Критерий Михайлова. Система будет устойчива, если вектор D(jw) при изменении частоты от 0 до +∞ повернется на угол np/2. При этом конец вектора опишет кривую, называемую годографом Михайлова. Годограф начинается на положительной полуоси при D(0) = an, и, при изменении частоты от 0 до ∞, последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, с уходом в бесконечность в n-ом квадранте. Если это правило нарушается, то такая система неустойчива.
Критерий Найквиста. Этот критерий основан на связи свойства устойчивости замкнутой системы с формой АФЧХ разомкнутой устойчивой системы. Разомкнутой системой являются все последовательно соединенные блоки от входа системы до точки замыкания обратной связи. Линейная динамическая система, устойчивая в разомкнутом состоянии, устойчива и в замкнутом состоянии, если при изменении частоты от 0 до +∞ разность между числом положительных переходов годографа АФЧХ разомкнутой системы через вещественную ось и числом отрицательных переходов равна нулю.
9. = 2 Классификация промышленных роботов.
Промышленный робот — устройство, состоящее из механического манипулятора и системы управления , которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов.
По способу управления: – роботы с программным управлением, работающие по заранее заданной жесткой программе; – роботы с адаптивным управлением, которые имеют средства очувствления и поэтому могут работать в заранее не регламентированных и меняющихся условиях, например, брать произвольно расположенные предметы, обходить препятствия и т. д.; – роботы с интеллектуальным управлением, которые наряду с очувствлением имеют систему обработки внешней информации, обеспечивающую им возможность интеллектуального поведения, подобного поведению человека в аналогичных ситуациях.
По назначению: - для обслуживания процессов литейного производства; - для обслуживания процессов сборочного производства; - для обслуживания процессов механической обработки; - для автоматизации штамповочного производства; - для обслуживания процессов сварочных работ.
По степени специализации: – универсальные роботы предназначены для выполнения разных операций и в том числе для работы совместно с разными видами оборудования; –специализированные роботы имеют более узкое назначение и осуществляют одну определенную операцию (например, сварку, окраску, обслуживание оборудования определенного вида); – специальные роботы выполняют только одну конкретную операцию (например, обслуживают конкретную модель технологического оборудования);
По характеру выполняемых операций: – производственные (технологические), которые выполняют основные операции технологического процесса и непосредственно в нем учувствуют в качестве производящих или обрабатывающих машин (сварочные, сборочные и т.д.); – подъемно-транспортные (вспомогательные), которые применяются для обслуживания основного технологического оборудования для выполнения вспомогательных операций, а также на транспортно-складских операциях; – универсальные – выполняют разнородные основные и вспомогательные операции.
По типу привода: – электрический; – гидравлический; – пневматический; – и пневмо-гидравлический. Часто их применяют в комбинации, например, в звеньях манипулятора большой грузоподъемности используют гидравлический привод, а в его захватном устройстве — более простой и маломощный пневматический.
По грузоподъемности Промышленные Роботы делятся на: – сверхлегкие – до 1 кг; – легкие – до 10 кг; – средние – до 100 кг; – тяжелые –до 1000 кг; – и сверхтяжелые – свыше 1000 кг.
Грузоподъемность робота обусловливается грузоподъемностью его манипуляторов, а при наличии нескольких манипуляторах — грузоподъемностью наиболее мощного из них.
По количеству манипуляторов: – однорукие; – двурукие; – трехрукие; – четырехрукие.
Классификация роботов по быстродействию: – малое – при линейных скоростях по отдельным степеням подвижности до 0,5 м/с; – среднее — при линейных скоростях свыше 0,5 до 1 м/с; – высокое — при линейных скоростях свыше 1 м/с.
Точность роботов: – малая — при линейной погрешности от 1 мм и выше; – средняя — при линейной погрешности от 0,1 до 1 мм; – высокая — при линейной погрешности менее 0,1 мм.
По числу степеней подвижности. Число степеней подвижности – это сумма возможных координатных перемещений объекта манипулирования относительно опорной системы.
По способу размещения промышленные роботы бывают стационарные и подвижные (передвижные) и подразделяются на напольные, подвесные (перемещаются по поднятому рельсовому пути) и встраиваемыми в другое оборудование (например, в обслуживаемый станок) и т. д.
10. Горячее, теплое и холодное резервирование. Общее и дробное. (383 АЭП) = 75
Резервирование является способом повышения надежности путем включения резерва(избыточных элементов) предусмотренного при разработке аппаратуры или в процессе ее эксплуатации.
Различают два основных вида резервирования: общее и раздельное. Общее резервирование состоит в резервировании системы в целом, а при раздельном резервировании система резервируется по отдельным участкам, блокам или элементам.
По способу включения избыточных элементов резервирование различают на постоянное и замещением.
При постоянном резервировании избыточные элементы присоединены к основным в течении всего времени работы и находятся в одинаковых с ними условиях. Постоянное резервирование позволяет получить системы с самым высоким коэффициентом готовности.
При резервировании замещением резервирующие элементы включаются взамен дублирующих только после их отказа. Резервирование замещением может быть с холодным, теплым или горячим резервом. Его недостатком является зависимость от надежности переключающих устройств.
- нагруженный (горячий) резерв - резервный элемент, который находится в таком же режиме, как и основой. Недостатком горячего резерва является уменьшение ресурса с течением времени. В системах автоматизации с горячим резервом переход на резерв может занимать время от нескольких миллисекунд до единиц секунд;
- облегченный (теплый) резерв – резервный элемент, находящийся в менее нагруженном состоянии, чем основной. Например, резервный компьютер в "спящем" режиме является облегченным резервом;
- ненагруженный (холодный) резерв - резервный элемент, находящийся в ненагруженном режиме до начала его использования вместо основного элемента. Ненагруженный резерв позволяет получить системы с самой высокой надежностью, но с низким коэффициентов готовности. Они эффективны в случае, когда система некритична к времени простоя величиной в несколько минут.
Основное отличие между "горячим", "холодным" и "теплым" резервом состоит в длительности периода переключения на резерв. При горячем резервировании контроллеров время переключения составляет от единиц миллисекунд до долей секунды, при теплом - секунды, холодном - минуты. Поэтому время переключения на резерв иногда рассматривают как основной признак при классификации резервирования замещением.