

78. Оперативные запоминающие устройства.
Оперативные запоминающие устройства (ОЗУ, RAM) осуществляют запись, хранение и считывание информации и работают только при включенном питании, т. е. ОЗУ являются энергозависимыми. ОЗУ по виду хранения информации разделяются на статические и динамические. В статическом ОЗУ в качестве элемента памяти используется триггер, в динамическом - конденсатор
Статическое
ОЗУ (структура статического
запоминающего устройства.)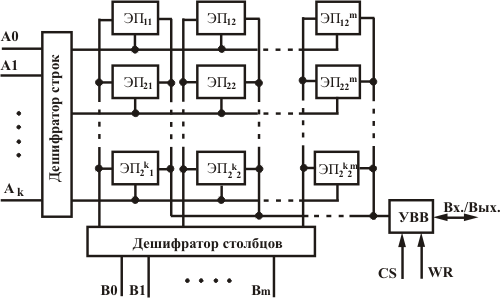
ЭП - это элемент памяти. Еще его называют запоминающим элементом (ЗЭ). Все эти элементы памяти заключены в матрице накопителя. Число элементов равно 2n, где n - целое число. Каждый конкретный ЭП хранит один бит информации и имеет свой адрес, задаваемый n-разрядным двоичным кодом. Для удобства адрес разбивают на две части (обычно одинаковые) - адрес строки и адрес столбца. В итоге получается прямоугольная матрица, содержащая 2k строк и 2m столбцов. Поскольку число строк и число столбцов значительно больше, чем разрядность двоичного числа, между адресными входами и матрицей элементов памяти ставят дешифраторы, на рисунке обозначенные как дешифратор строк и дешифратор столбцов.
Собственно элементом памяти является D-триггер, находящийся на пересечении i-й строки и j-го столбца. Для уменьшения количества выводов микросхем ОЗУ совмещают входы и выходы в них. Поэтому на схеме введен еще и электронный ключ SW. При уровнях лог. 1 на линиях i и j и при подаче сигнала разрешения записи WR=1 (от буржуйского write - записывать), в триггер записывается информация, которая поступает на вход D. При этом шина Вх./Вых. оказывается подключенной к D входу триггера через электронный ключ SW и выполняет функции входа, при снятии сигнала WR ключ подключает к шине Вх./Вых. выход триггера, и эта шина выполняет функции выхода.
Динамическое ОЗУ Как говорилось ранее, в динамическом ОЗУ функции элемента памяти выполняет конденсатор. Информация представляется электрическим зарядом, к примеру, если есть заряд на конденсаторе, значит в элемент памяти записана лог. 1, нет заряда - лог. 0. Ну а поскольку время сохранения на конденсаторе заряда ограничено (вследствие утечки), необходимо периодически восстанавливать записанную информацию. Этот процесс называется регенерацией. Помимо этого, для динамического ОЗУ требуется синхронизация, обеспечивающая последовательность включений функциональных узлов.
Для реализации
элемента памяти динамического ОЗУ
широко применяется схема, показанная
на рисунке 3.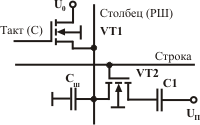
Выбор элемента памяти производится сигналом лог. 1 на шине строки. Транзистор VT2 открывается и соединяет конденсатор С1 с шиной столбца. РШ - разрядная шина. Предварительно через транзистор VT1, который открывается сигналом "Такт (С)", заряжается емкость Сш до напряжения U0. Емкость Сш должна значительно превышать емкость С1. Элемент памяти динамического ОЗУ проще, чем статического, поэтому объем памяти в динамических ОЗУ выше, чем в статических. Соответственно, при большой разрядности адреса его делят на две части.
79. Частотные критерии устойчивости. (=103)
Частотные критерии устойчивости основаны на связи расположения корней характеристического полинома с годографом этого полинома на комплексной плоскости, т.е. с графиком комплексной функции D(jw) при изменении w от 0 до ∞. По принципу аргумента Коши: контур , охватывающий на -плоскости некоторое число неаналитических точек, может быть отображён на другую комплексную плоскость (плоскость ) при помощи функции таким образом, что получившийся контур будет охватывать центр -плоскости раз, причём , где — число нулей, а — число полюсов функции Критерии используется для определения степени устойчивости, а также путей приведения САУ к устойчивому состоянию ввиду своей наглядности, а также отсутствию необходимости вычисления полюсов передаточной функции замкнутой системы.
Критерий Михайлова. Система будет устойчива, если вектор D(jw) при изменении частоты от 0 до +∞ повернется на угол np/2. При этом конец вектора опишет кривую, называемую годографом Михайлова. Годограф начинается на положительной полуоси при D(0) = an, и, при изменении частоты от 0 до ∞, последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, с уходом в бесконечность в n-ом квадранте. Если это правило нарушается, то такая система неустойчива.
Критерий Найквиста. Этот критерий основан на связи свойства устойчивости замкнутой системы с формой АФЧХ разомкнутой устойчивой системы. Разомкнутой системой являются все последовательно соединенные блоки от входа системы до точки замыкания обратной связи. Линейная динамическая система, устойчивая в разомкнутом состоянии, устойчива и в замкнутом состоянии, если при изменении частоты от 0 до +∞ разность между числом положительных переходов годографа АФЧХ разомкнутой системы через вещественную ось и числом отрицательных переходов равна нулю.