

Тема 2.4. Электроприводы с асинхронными двигателями.
2.4.1.Основные соотношения. Способы управления ад.
Развитие полупроводниковой преобразовательной техники привело к широкому использованию ЭП с двигателями переменного тока. По сравнению с СУЭП постоянного тока СУЭП переменного тока значительно более разнообразны. В регулируемых ЭП используются АД с короткозамкнутым или фазным ротором, синхронные и вентильные ЭД. Применяются различные способы регулирования скорости ЭД путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и др.
Управление ЭД переменного тока осложнено обстоятельствами:
момент ЭД определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных,
имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора,
с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Наиболее простым, дешевым и надежным двигателем переменного тока является асинхронный двигатель (АД). Меньший момент инерции ротора которого позволяет получить высокие ускорения при относительно небольшом движущем моменте. Этот двигатель не имеет коммутационных ограничений по скорости и нагрузке, которые так усложняют эксплуатацию ДПТ. Вместе с тем использование АД, предназначенных для нерегулируемого привода в системах с широким изменением угловой скорости, усложняется несинусоидальностью питающего напряжения, ухудшением условий охлаждения самовентилируемых двигателей при низких угловых скоростях и пульсаций электромагнитного момента.
Электромеханическая характеристика АД описывается выражением
I2=Uф/(R1+R2/s)2+xк2) (2.1)
где xк=x1+x2 - индуктивное фазное сопротивление короткого замыкания.
Механическая характеристика АД
М=3Uф2 R2/s((R1+R2/s)2+xк2) (2.2)
Формула (2.2) определяет возможные способы получения искусственных механических характеристик, требуемых при регулировании момента и скорости АД, а именно:
изменение уровня и частоты подводимого к двигателю напряжения,
включение в цепи статора и ротора добавочных активных и реактивных резисторов,
изменение числа пар полюсов магнитного поля АД.
2.4.2. Основные соотношения и схема замещения АД при частотном регулировании.
Схема замещения АД имеет вид
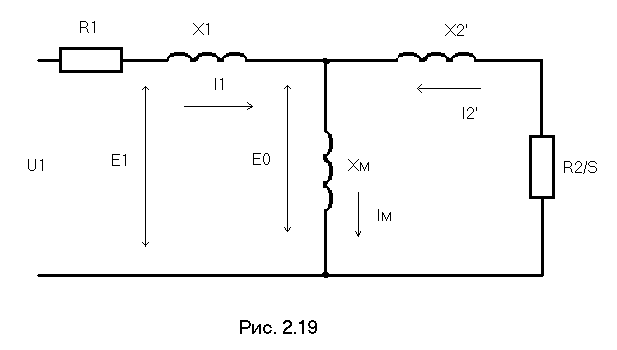
Xμ – индуктивность намагничивающего контура
Е0 – ЭДС намагничивающего контура
Iμ – ток намагничивающего контура
R1, X1 – активное и реактивное сопротивление обмотки статора
R2`/S, X2` - приведенные активное и реактивное сопротивления обмотки статора.
Напряжение фазы статора АД равно
U1E1=4.44w1кобf1Ф
E1 - ЭДС статора, вызванная главным потоком двигателя
w1 - число витков фазы статора
коб - обмоточный коэффициент статора
f1 - частота напряжения источника питания
Ф - главный поток двигателя
К=(4.44 w1коб)-1
Ф= E1К/f1
ЭДС E1 определяется подводимым напряжением U1. Пренебрегая падением напряжения на активном сопротивлении R1 статорной цепи можно приближенно считать, что E1U1
Отсюда Ф=К U1/f1
Если регулировать скорость вниз от номинальной при неизменном U1, то при уменьшении частоты f1 поток будет увеличиваться. Увеличение потока приведет к насыщению магнитной системы машины и уменьшению индуктивного сопротивления обмотки статора. Вследствие чего возрастает ток ХХ машины и, при нагрузке двигателя номинальным моментом, он перегрузится в тепловом отношении. Следовательно, для недопущения этого необходимо с уменьшением частоты уменьшать и напряжение U1, чтобы поток Ф оставался постоянным, т.е. выполнялся пропорциональный закон частотного регулирования.
U1/f1 = const
 При
регулировании скорости на номинальных
частотах критический момент Мк
двигателя несколько снижается из-за
влияния активного сопротивления R1
(сплошные линии на рис.2.20).
При
регулировании скорости на номинальных
частотах критический момент Мк
двигателя несколько снижается из-за
влияния активного сопротивления R1
(сплошные линии на рис.2.20).
Если система управления ПЧ предусматривает компенсацию падения напряжения в активном сопротивлении статора двигателя, т.е. поддерживается постоянство отношения (U1-I1R1)/f1, то механические характеристики принимают вид кривых, выполненных на рис.2.20 штриховыми линиями.
Компенсация подразумевает под собой введение обратной связи по току с коэффициентом R1.
При регулировании скорости вверх от номинальной частоту надо увеличивать. Однако, в этом случае напряжение увеличивать невозможно, т.к. двигатель рассчитан на номинальное напряжение. Поэтому при регулировании скорости вверх от номинальной, увеличивается магнитный поток АД, т.е. регулирование осуществляется с ослаблением поля. Вследствие уменьшения магнитного потока уменьшается критический момент АД.
В 1925 г. Костенко М.П. сформулировал закон частотного управления:
Если сконструировать АД для частоты f1н, момента Мн и напряжения на зажимах U1н и изменить затем при частоте f1 и моменте Мс напряжение U1, таким образом, чтобы всегда было удовлетворено соотношение
U1/f1 = U1н / f1н (Мс/Мн),
то двигатель будет работать практически при неизменном cosн и постоянном абсолютном скольжении и КПД, зависящем только от изменения частоты и не зависящем от изменения момента на валу, если насыщение магнитной системы не слишком велико.
Принцип частотного регулирования АД базируется на линейной зависимости угловой скорости магнитного поля от частоты питающего напряжения. По этому принципу возможно осуществление широкорегулируемых ЭП с весьма жесткими механическими характеристиками.
Важным преимуществом частотного привода являются очень хорошие энергетические показатели. На всем диапазоне регулирования двигатель работает при малых скольжениях, что обуславливает малые потери и достаточно высокий КПД. Это выгодно отличает частотное регулирование от всех других способов изменения скорости АД.
При частотном регулировании одновременно с изменением частоты необходимо изменять напряжение, подведенное к статору двигателя. Это объясняется необходимостью регулирования магнитного потока машины во избежания насыщения, увеличения потерь в стали или чрезмерного уменьшения электромагнитного момента.
Наличие двух каналов воздействия – по напряжению и частоте – значительно усложняет систему управления двигателем. Если принять во внимание, что сигналы переменного тока требуют еще управления фазой, а система управления – трехфазная, сложность управления значительно увеличится.
Таким образом, простота исполнительного двигателя в известной мере «уравновешивается» сложностью системы управления. Вместе с тем, если сложность электромеханической системы является органическим недостатком, которого невозможно избежать, то особенности технологии электронных схем позволяют преодолеть сложность системы управления. Это возможно путем применения специализированных интегральных схем, микропроцессорных наборов и других средств современной микроэлектроники.
2.4.3. Системы ЭП с автономными инверторами тока и напряжения.
Питание АД осуществляется от преобразователей частоты, которые делятся на 2 группы: двухзвенные преобразователи и непосредственные преобразователи. В ЭП малой мощности считается целесообразным применять двухзвенные преобразователи. Достоинством преобразователя является возможность получения напряжения любой требуемой частоты и амплитуды, недостатком – двукратное преобразование энергии, что снижает КПД и увеличивает массогабаритные показатели.
В преобразователях с непосредственной связью (НПЧ) происходит однократное преобразование энергии, что обуславливает большой КПД и меньшие габаритные размеры и массу. Недостатки:
низкий коэффициент мощности со стороны питающей сети,
большой процент высших гармоник в выходном напряжении,
сложность системы управления и ограниченность максимального значения выходной частоты.
Двухзвенный преобразователь содержит управляемый выпрямитель, фильтр и автономный инвертор. В зависимости от режима работы инверторы делятся на инверторы напряжения (АИН) и инверторы тока (АИТ). На выходе АИН заданным является напряжение, которое определяется порядком переключения силовых элементов, а ток определяется характером нагрузки. Источник питания должен обладать малым внутренним сопротивлением, поэтому на вход инвертора включают конденсатор большой емкости. При питании от АИН активно-индуктивной нагрузки предусматривается так называемый обратный выпрямитель, что позволяет току в нагрузке протекать со сдвигом по фазе по отношению к напряжению.
Схема АИН приведена на рис.2.25 (плакат). Выпрямленное посредством V1 напряжение Ud фильтруется с помощью конденсатора Сф. Затем с помощью автономного инвертора на тиристорах V2 снова преобразуется в трехфазное переменное напряжение А, В, С. попарное периодическое включение и отключение тиристоров анодной и катодной групп приводит к тому, что напряжение на нагрузке имеет прямоугольную форму с амплитудой, равной среднему значению выпрямленного напряжения. Включить тиристор можно, подав на управляющий электрод отпирающий импульс, а для его закрытия необходимо предусмотреть коммутирующие конденсаторы Ск, которые после открывания очередного тиристора разряжаются по контуру конденсатор – предыдущий тиристор – очередной тиристор. Предыдущий тиристор, к которому прикладывается обратное напряжение, закрывается.
Для предотвращения разряда конденсатора через нагрузку предусматривают отсекающие диоды V3. Реакторы L1 и L2 необходимы для ограничения разряда коммутирующих конденсаторов через обратные диоды. Такой инвертор получит название инвертора с междуфазовой коммутацией. Регулирование действующего напряжения на нагрузке осуществляется изменением среднего значения напряжения с помощью выпрямителя. Улучшить гармонический состав выходного напряжения можно, применив широтно-импульсную модуляцию, но для этого требуется индивидуальная коммутация тиристоров. Схема такого инвертора содержит в 2 раза больше силовых тиристоров: для каждого основного тиристора установлен один дополнительный – коммутирующий, что обеспечивает полную управляемость тиристора. Путем изменения длительности включения основного тиристора в пределах времени его работы по синусоидальному закону и выбора высокой частоты коммутации можно сформулировать синусоидальное напряжение на нагрузке. Гармоники высокого порядка будут отфильтрованы индуктивностями нагрузки.
На выходе инвертора тока заданным является ток в нагрузке, определенный порядком переключения тиристоров, а напряжение получается зависимым от характера нагрузки
Uн=Ud(Kнcos) (2.3)
где Uн – действующее напряжение фазного напряжения на нагрузке,
Ud – среднее напряжение выпрямителя,
Kн – коэффициент схемы (для мостового инвертора Kн=2.34, для трехфазного инвертора со средней точкой Kн=1.17).
Питание инвертора тока должно осуществляться от источника тока, практически это достигается либо включением реактора с очень большой индуктивностью, либо с помощью охвата выпрямителя отрицательной обратной связью по току.
Схема простейшего АИТ показана на рис.2.26. по сравнению со схемой АИН она не содержит конденсатора в цепи постоянного тока и обратного выпрямителя. АИТ допускает осуществление рекуперативного торможения за счет его перевода на тиристорах V2 в режим выпрямителя, а управляемого выпрямителя – на тиристорах V1 – в режим инвертора, ведомого сетью. При этом ток промежуточной цепи постоянного тока не изменяется по направлению, а изменяется полярность напряжения управляемого выпрямителя.
Внешняя характеристика АИН представляет собой в идеальном случае прямую, параллельную оси абсцисс, т.е. напряжение на нагрузке не зависит от тока (рис.2.27, прямая 1). Внешнюю характеристику АИТ можно получить из выражения (2.3). Кривая 2 соответствует случаю, когда напряжения питания остается неизменным. Сos АД при снижении нагрузки уменьшается, что и вызывает возрастание напряжения на нагрузке при снижении тока.
В автономных инверторах выполненных на транзисторных ключах, которые допускают высокую частоту коммутации, часто используют ШИМ выходного напряжения. При этом инвертор изменяет не только частоту выходного напряжения, но и регулирует его амплитуду. Это позволяет отказаться от регулируемого тиристорного выпрямителя в звене постоянного тока и использовать более простой нерегулируемый диодный выпрямитель.
Принцип действия инвертора с ШИМ иллюстрируется на рис.2.28. период синусоидального сигнала разбивается на большое число малых интервалов длительностью t. На каждом интервале создаются два разнополярных импульса длительностью t1 и t2. Если длительность положительного и отрицательного импульса одинакова, то среднее значение напряжения на интервале равно нулю. В противном случае получают положительное или отрицательное среднее напряжение, пропорциональное модулю разности длительности этих импульсов t1- t2.
Когда один из импульсов имеет нулевую длительность, получают максимальное значение напряжения, равное Ud.
ШИМ позволяет значительно уменьшить высшие гармонические составляющие в выходном напряжении инвертора и приблизить его к синусоиде.
2.4.3. ЭП с непосредственным преобразователем частоты (НПЧ).
Одна из распространенных схем тиристорного трехфазного НПЧ, состоящая из трех одинаковых комплектов тиристоров 2,3,4, обеспечивающих питание обмоток статора АД za, zb и zc показана на рис. 2.29. К комплектам тиристоров подсоединены начала фазных обмоток С1, С2, С3, а концы этих обмоток подключены к нулевой точке трансформатора 1. Нулевая точка трансформатора подсоединена с общей точкой трехфазной обмотки статора, поэтому схема называется нулевой. Каждая фаза этой схемы работает независимо от остальных, поэтому для пояснения принципа ее действия рассмотрим одну фазу А, управляемую комплектом 2 тиристоров VS1…VS6.
Предположим, что фазные напряжения на вторичных обмотках трансформатора изменяются по синусоидальному закону (рис.2.30,а), а нагрузка имеет активный характер (если нагрузкой является АД, то ее характер будет активно-индуктивный).
Предположим также, что тиристоры VS1…VS6 закрыты (управляющие импульсы от блока управления на них не подаются). В этом случае все напряжение с выхода трансформатора прикладывается к закрытым тиристорам и напряжение на статоре равно нулю.
Подадим теперь от блока управления импульсы на тиристоры VS1 в момент t1, на VS2 – в момент t2 и на VS3 – в момент t3. Так как в эти моменты времени потенциалы анодов более высокие, чем катодов, то они откроются и к фазе статора будет приложено напряжение, соответствующее участкам трех синусоид вторичных напряжений трансформатора ua, ub и uc. Если снять управляющие импульсы с тиристоров VS1…VS3 и подать импульсы на тиристоры VS6, VS4, VS5 в моменты времени t5, t6 и t7, то на нагрузке также образуется напряжение, соответствующее участкам трех синусоид, но уже противоположной полярности. При поочередном открытии групп тиристоров VS1…VS3 и VS4…VS6 в указанном порядке изображенная на рис.2.30,б кривая U1рег будет периодически повторяться. Таким образом, к фазе обмотки статора подводится напряжение переменного тока с периодом Tрег и частотой fрег=1/Tрег. Период Tрег этого напряжения больше, чем период сетевого напряжения T1, т.е. частота напряжения на статоре АД меньше, чем частота питающего напряжения. Соотношение между этими величинами для трехфазной схемы
Tрег=T13+2(h-1)/3 (2.4)
где h=2,3… - число открываемых тиристоров в комплекте.
Из (2.4) следует, что НПЧ может обеспечивать регулирование частоты на статоре АД только в сторону ее уменьшения по сравнению с сетевой.
Расширение диапазона регулирования частоты на выходе НПЧ достигается введением паузы tп между моментом снятия импульсов управления с тиристоров VS1…VS3 и подачи их на тиристоры VS4…VS6. В этом случае выходная частота
fрег=3f1/(3+2(h-1)+tпf1) (2.5)
Рассматриваемые ПЧ позволяют регулировать также и напряжение Uрег на АД, для чего управляющие импульсы на тиристоры подаются не в моменты t1,t2,t3,… (рис.2.30,в), а с некоторой задержкой, которая углу управления тиристорами . Изменяя с помощью СУ момент подачи импульсов на тиристоры, можно регулировать напряжение нагрузки от 0 (=90) до максимального значения (=0).
2.4.4. Системы с векторным и частотно-токовым управлением.
Наиболее широкое распространение получил способ управления АД, при котором во всем диапазоне регулирования скорости и изменения нагрузки поддерживается постоянным модуль вектора потокосцепления ротора. При таком регулировании обеспечиваются постоянная перегрузочная способность АД, высокие энергетические показателя и высокое быстродействие. Высокое быстродействие в этом случае получается за счет того, что основной поток машины всегда остаются постоянным.
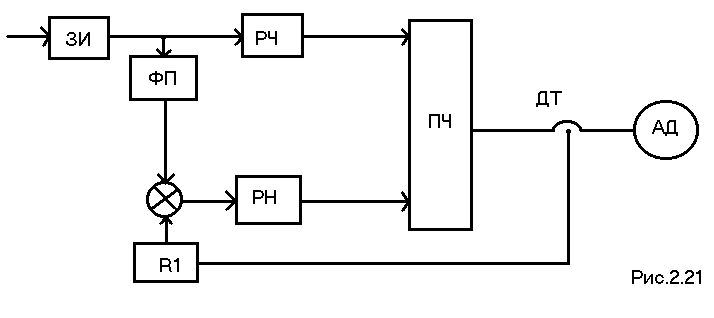
Функциональная схема асинхронного ЭП с частотно-токовым регулированием скорости и внутренним контуром момента представлена на рис.2.31. Формирование вектора тока статора заключается в преобразовании скольжения, т.е. разности заданной угловой скорости поля и реальной угловой скорости двигателя. Поэтому структурный блок, формирующий изображающий вектор тока статора и фазные токи, может быть назван регулятором скорости (РС). Он состоит из двух элементов. В первом элементе - регуляторе вектора тока статора (РВТ) – производятся преобразования: сигнал, пропорциональный заданному значению потокосцепления , суммируется векторно с произведением этого сигнала на величину скольжения. Эта операция позволяет определить амплитуду и фазу вектора тока статора.
Выделение угловой частоты осуществляется двумя функциональными блоками: формирователем частоты скольжения (ФЧС) и формирователем частоты вращения (ФЧВ).
Во втором элементе регуляторе скорости – регуляторе фазных токов (РФТ) – формируются гармонические сигналы фазных токов. Ток фазы С находится как сумма токов двух других фаз.
Система ЭП содержит внутренний подчиненный контур тока, состоящий из датчиков фазных токов и регулятора тока (РТ), который вырабатывает управляющие сигналы, непосредственно воздействующие на преобразователь частоты (ПЧ).
Функциональная схема системы векторного управления показана на рис.2.32. системы имеет два канала управления: модулем вектора потокосцепления ротора 2з с регулятором РПТ (потока) и угловой скоростью ротора з с регулятором РС. Двухканальная система управления дает возможность осуществить независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранение прямой пропорциональности между моментом, развиваемым АД, и составляющей МДС статора, вектор которой перпендикулярен вектору потокосцепления ротора. Изменение текущих значений переменных производится в неподвижной системе координат с помощью датчика потока ДП и датчика тока статора ДТ. ДП измеряет составляющие mx, my двигателя при помощи датчиков Холла, причем ось Х совмещается с магнитной осью обмотки фазы А. ДТ измеряет мгновенные значения токов в трех фазах статора и преобразует их в двухфазную систему переменных.
Для пересчета переменных из неподвижной системы координат в систему координат, связанную с потокосцеплением ротора, используется вектор-фильтр ВФ и координатные преобразователи КП1, КП2.
Регуляторы тока РТ1, РТ2 через блок коммутации БК, координатный преобразователь КП1 и преобразователь фаз ПФ формируют трехфазную систему напряжений на входах ПЧ.
2.4.5. Комплектный ЭП с АД.
Наибольшее распространение среди КЭП с АД получил «Размер 2М-5-21». Этот глубокорегулируемый ЭП предназначен для работы в системах автоматического регулирования частоты вращения и положения двух механизмов подачи и одного главного движения металлорежущих станков.
Упрощенная функциональная схема ЭП приведена на рис.2.33.
Где БРП – блок регулирования потока,
РС – регулятор скорости,
ПНЧ – преобразователь напряжение – частота,
ФТР – формирователь температурной коррекции,
БЗТ – блок задания тока,
РТ – регулятор тока,
ФИ – формирователь импульсов,
ИФП – импульсный фазопреобразователь,
БТК – блок силовых транзисторных ключей,
ДП – датчик положения.
ЭП работает по принципу частотно-токового управления. САУ должна сформулировать задание по амплитуде, частоте и фазе тока статора АД. Ток статора равен сумме двух составляющих: тока намагничивания Id и тока ротора Iq. Из системы ЧПУ на вход поступает сигнал задания скорости uз.с. Регулятор скорости формирует сигнал uq, задающий абсолютное скольжение.
На рис.2.34 приведена двухканальная схема, поясняющая принцип формирования сигналов, задающих токи статора. В первом канале вырабатывается сигнал, определяющий амплитуду и фазу тока, а во втором частоту тока статора. Сигнал, задающий поток машины Ud, выдает блок регулирования потока БРП.
Рис.2.34.








В блоке задания токов происходит формирование сигналов задания токов в фазах А и В. Сигнал с ФЧ управляет ключами блока ЗТ, открывая и закрывая их.
ЭП имеет три регулятора тока, по одному на каждую фазу. На вход каждого РТ приходит два канала: задание и обратной связи.
ЭП обеспечивает контроль функционирования датчиков тока, источников питания фазовращателя и выходных усилителей, уровня напряжения и допустимого тока нагрузки, источников питания СУ. Обеспечивается защита двигателя от превышения температуры, предусмотрена блокировка от ограничивающего конечного выключателя. При пропадании напряжения сети обеспечивается аварийное торможение двигателей.