

Раздел 2.Замкнутые системы автоматизированного управления электроприводами.
Тема 2.1. Элементы и устройства замкнутых сауэп.
Под термином «элемент» автоматизированного электропривода понимается входящее в него устройство выполняющее определенную функцию управления, в соответствии с которой входное воздействие элемента преобразуется в выходное.
АЭП можно представить в виде совокупности силовых и управляющих элементов (рисунок 1). Силовые элементы преобразуют, регулируют и приводят к рабочему органу (РО) механизма основной поток энергии, к ним относятся: управляемые преобразователи энергии (УПЭ), электродвигатели (М), передаточные механизмы (ПМ), рабочие органы машин и механизмов. Управляющие элементы формируют, преобразуют и подводят сигналы управления к силовым элементам.
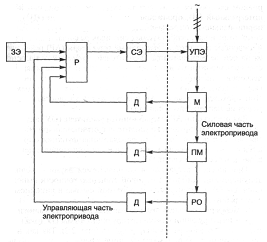
Рисунок 2.1 - Структурная схема автоматизированного электропривода в виде совокупности
силовых и управляющих элементов
Управляющие элементы можно разделить на две группы:
элементы систем управления вентилями УПЭ, которые преобразуют сигнал управления с выхода системы автоматического управления (САУ) в открывающие импульсы;
элементы САУ, формирующие задающие и управляющие воздействия и определяющие статические и динамические свойства АЭП.
По функциональному признаку элементы второй группы делятся на следующие виды:
регуляторы (Р), которые вычисляют разность сигналов задания и обратной связи (рассогласование) и на её основе формируют управляющее воздействие, приводящее регулируемую координату к заданному значению;
датчики (Д), преобразующие управляемую координату в электрический сигнал, используемый как сигнал обратной связи;
задающие элементы (ЗЭ), которые формируют задающие воздействия, определяющие технологическую программу работы АЭП;
согласующие элементы (СЭ), которые согласуют выходные и входные координаты соединяемых элементов по роду тока, виду и уровню сигналов и т.п.
2.1.1. Элементы и устройства автоматизированного управления ЭП в замкнутых системах: усилители, формирующие и управляющие элементы.
Операционный усилитель (ОУ) является основным элементом аналоговой системы. Он представляет собой усилитель постоянного тока с очень большим коэффициентом усиления (до 10000), охваченный отрицательной обратной связью.
Операционный усилитель осуществляет преобразование входных сигналов Uвхi в соответствии с выражением
(2.1)
где n – число входных сигналов;
zвхi – в общем случае комплексные активно-емкостные входные
сопротивления ОУ;
zос – комплексное сопротивление цепи обратной связи.
В простейшем случае, когда на вход ОУ поступает один сигнал Uвх, а zос=Rос и zвх1=R1, преобразование входного сигнала будет иметь вид
(2.2)
т.е. происходит его умножение на коэффициент к=Rос/R1 и изменение знака на противоположный. При Rос=R1 и к =1 имеет место так называемое инвертирование входного сигнала по знаку.
Если zос=Rос и zвхi=Rвхi, то ОУ осуществляет суммирование подаваемых на него электрических сигналов с одновременным умножением на соответствующий коэффициент, т.е.
(2.3)
где кi=Rос/Rвхi.
При включении на входные цепи и цепи обратных связей наряду с резисторами конденсаторов ОУ могут осуществлять и другие весьма разнообразные преобразования входных сигналов, необходимые для получения требуемых управляющих воздействий в ЭП. Такие схемы получили название регуляторов.
Регулятор выполняет вычисление рассогласования (разность между сигналом задания и сигналом обратной связи) и его преобразование в управляющее воздействие в соответствии с определенной математической операцией.
В САУ используются в основном следующие типы регуляторов: пропорциональный (П), интегральный (И) и пропорционально-интегральный (ПИ). В зависимости от вида преобразуемых сигналов различают аналоговые и цифровые регуляторы.
Аналоговые регуляторы (АР) реализуются на основе операционных усилителей, цифровые — на основе специализированных вычислительных устройств или микропроцессоров. Аналоговые регуляторы преобразуют только аналоговые сигналы, являющиеся непрерывными функциями времени. При прохождении через АР преобразуется каждое мгновенное значение непрерывного сигнала.
Для реализации АР операционный усилитель (ОУ) включается по схеме суммирующего усилителя с отрицательной обратной связью. Тип регулятора и его передаточная функция определяются схемой включения резисторов и конденсаторов в цепях на входе и в обратной связи ОУ.
Пропорциональный регулятор (П-регулятор) реализуется при включении в цепь обратной связи ОУ резистора с сопротивлением Rос. Этот регулятор характеризуется коэффициентом пропорциональности к, который может быть равен как больше, так и меньше единицы.
Интегральный регулятор (И-регулятор) реализуется при включении в цепь обратной связи ОУ конденсатора Сос. Этого тип регулятора характеризуется постоянной времени Т.
Пропорционально-интегральный регулятор (ПИ-регулятор) реализуется при включении в цепь обратной связи ОУ резистора с сопротивлением Rос и конденсатора Сос. Такой регулятор характеризуется следующими параметрами: коэффициентом пропорциональности к и постоянной времени Т.
Для всех типов регуляторов в схеме реализации имеется входное сопротивление R1.
Схемы реализации регуляторов, зависимость напряжения на выходе регулятораUвых от входного Uвх и их графическое изображение, а также формулы для нахождения параметров регуляторов приведены в таблице 2.1
2.2.2. Датчики и измерительные устройства. Полупроводниковые преобразователи.
Силовая часть замкнутых ЭП реализуется на основе преобразователей: выпрямителя, инвертора, преобразователя частоты, регулятора напряжения постоянного или переменного тока. В этих преобразователях используются диоды, тиристоры, транзисторы и различные модули на их основе.
В замкнутых ЭП для формирования требуемых статических и динамических характеристик применяются обратные связи по скорости, положению, току и напряжению, реализуемых с помощью соответствующих датчиков. Рассмотрим некоторые из них.
Датчики напряжения для ЭП с ДПТ выполняются на основе потенциометра, включаемого на зажимы якоря М двигателя (рис.2.1,а).
Уровень сигнала обратной связи по напряжению Uо.н., снимаемого с потенциометра RP и коэффициент обратной связи по напряжению определяются положением движка потенциометра.
Для получения сигнала обратной связи по напряжению в ЭП с двигателями переменного тока используются трансформаторные схемы (рис.2.1,б). Аналогичные схемы применяются в системе УВ-ДПТ, где трансформаторы напряжения подключаются к цепям переменного тока УВ.
Датчики тока (ДТ) предназначены для получения информации о силе и направлении тока двигателя. К ним предъявляют следующие требования:
• линейность характеристики управления в диапазоне от 0,1Iном до 5Iном не менее 0,9;
• наличие гальванической развязки силовой цепи и системы управления;
• высокое быстродействие.
![]()
Рисунок 2.2 – Структурная схема датчика координат АЭП
В качестве измерительных преобразователей в ДТ используются трансформаторы тока, дополнительные (компенсационные) обмотки сглаживающих дросселей, элементы Холла, шунты.
Широкое распространение для измерения тока двигателей получили датчики тока на основе шунтов. Шунт представляет собой четырехзажимный резистор с чисто активным сопротивлением Rш (безындуктивный шунт), к токовым зажимам которого подключается силовая цепь, а к потенциальным — измерительная. (рисунок 2.3)
Для ослабления влияния шунта на прохождение тока в цепи двигателя его сопротивление должно быть минимальным. Номинальное падение напряжения на шунте составляет обычно 75 мВ, поэтому его необходимо усилить с помощью усилителя У. Так как шунт имеет потенциальную связь с силовой цепью, датчик тока должен содержать устройство гальванической развязки (УГР). В качестве таких устройств применяются трансформаторные и оптоэлектронные устройства.
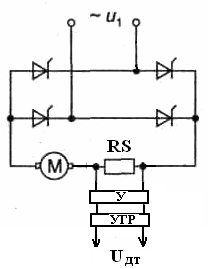
Рисунок 2.3 – Схема включения датчика тока на основе шунта
ДТ на основе трансформаторов тока в основном используются в АЭП постоянного тока для измерения тока двигателей при питании их от симметричных мостовых однофазных и трехфазных выпрямителей. Для однофазного выпрямителя (рисунок 2.4) используется один трансформатор тока (ТА1), а для трехфазного — три трансформатора, включенных в звезду. Для обеспечения режима работы трансформаторов тока, близкого к режиму короткого замыкания, их вторичные обмотки нагружаются низкоомными резисторами RТТ (0,2...1,0 Ом). Преобразование переменного напряжения вторичных обмоток осуществляется выпрямителем VD1...VD4 .
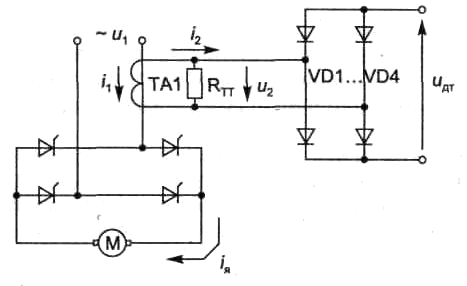
Рисунок 2.4 – Схема включения датчика тока на основе трансформатора тока
Датчики ЭДС якоря. При невысоких требованиях к диапазону регулирования скорости (до 50) в качестве главной обратной связи в электроприводе применяется обратная связь по ЭДС. Принцип действия датчика ЭДС якоря основан на вычислении ЭДС двигателя.
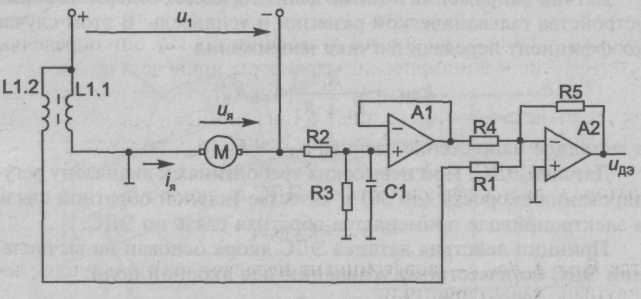
Рисунок 2.5 – Функциональная схема датчика ЭДС якоря
Для измерения напряжения якоря используется делитель на резисторах R2, R3 . Для измерения тока якоря двигателя используется дополнительная обмотка L1.2 сглаживающего дросселя. Напряжение ия через делитель, RС-фильтр и повторитель А1 подается на сумматор А2. На вход сумматора А2 подается также сигнал, пропорциональный падению напряжения на обмотке якоря Rя.ц ∙iя.
Выражение выходного напряжения uдэ усилителя А2 для установившегося режима работы имеет вид
![]()
где кдэ – коэффициент передачи датчика ЭДС,
ея – ЭДС якоря.
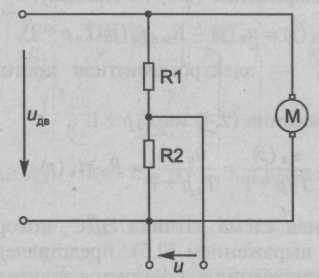
Рисунок 2.6 – Схема включения датчика напряжения
Выходное напряжение делителя равно
![]()
Датчик напряжения помимо делителя может содержать также устройства гальванической развязки и
усилитель.
Датчики скорости. Сигнал, пропорциональный угловой скорости ротора (или якоря) двигателя, снимается с датчика угловой скорости тахогенератора, который сочленяется с валом двигателя. Зависимость ЭДС тахогенератора от угловой скорости практически линейна Етг.
Контроль и измерение скорости могут осуществляться и с помощью тахометрического моста (рис.2.7), напряжение U которого пропорциональна скорости двигателя. Плечи моста образованы резисторами R1, R2, обмоткой дополнительных полюсов ОДП двигателя с сопротивлением Rд.п., якорем двигателя с сопротивлением Rя и ЭДС Е= К одной диагонали моста подводится напряжение питания якоря двигателя Uс, с другой диагонали (между точками 1 и 2) снимается напряжение, пропорциональное угловой скорости U. Если выбрать значения сопротивлений резисторов R1 и R2 так, чтобы соблюдалось условие R1Rя=R2Rд.п., мост будет сбалансирован. Тогда напряжение
U=R1R1+R2)=c
Датчики положения применяются для получения электрического сигнала, пропорционального положению исполнительного органа или вала машины. В таких датчиках используются сельсины, потенциометры и вращающиеся трансформаторы.
Сельсинные датчики положения с выходом на постоянном токе (рис.2.8,а) соединяются с исполнительным органом или валом двигателя, в результате чего их выходное напряжение будет пропорционально положению.
В следящем ЭП применяется сельсинное устройство, выполняющее функции задатчика, датчика положения и измерителя рассогласования (ошибки). Оно включает в себя два сельсина, обмотки роторов которых соединены между собой. При этом обмотка статора одного сельсина (задатчика0 подсоединяется к источнику питания, а со статорной обмотки другого сельсина (датчика0 снимается напряжение, значение и фаза которого определяются углом рассогласования между положением их роторов. Далее этот сигнал подается на фазочувствительный выпрямитель.
Потенциометрические датчики положения выполняются по схемам рис. 2.9, в…д. При соединении движка такого датчика с валом двигателя его выходное напряжение будет пропорционально положению вала.
Датчики положения на основе вращающихся трансформаторов являются электромеханическими устройствами. Как, и в сельсинах, напряжение на их выходах определяется положением подвижной части.
2.2.3. Командные и задающие элементы, используемые в ЭП.
Для введения в СУЭП сигналов, необходимых при получении требуемого регулируемого параметра, служат командные и задающие элементы – задатчики скорости и интенсивности.
Командные устройства реализуются на базе сельсинного командоаппарата типа СКА. Рассмотрим его схему (рис.2.9, а). Однофазная обмотка статора сельсина ОС подключается к сети переменного тока напряжением Uс=110 В частотой 50 Гц. Выходное напряжение переменного тока Uвых снимается с двух фаз обмотки ротора и далее выпрямляется с помощью неуправляемого выпрямителя VD или фазочувствительного выпрямителя ФЧВ. В первом случае выходное напряжение Uвых1 будет иметь постоянную полярность, а во втором случае полярность сигнала Uвых2, будет зависеть от сдвига фаз напряжений статора и ротора. Таким образом, ФЧВ является по существу выпрямителем, полярность сигнала, на выходе которого определяется фазой входного напряжения переменного тока.
При повороте ротора сельсина амплитуда наводимых в его обмотках ЭДС и соответственно выходного напряжения Uвых изменяется от нуля в начальном положении ротора (=0) до максимального значения при =90 (рис.2.9,б) по кривой Uвых1(). Для получения примерно линейной зависимости выходного сигнала командоаппарата в функции угла поворота ротора используется зона .
В схемах управления широко используются и потенциометрические задающие устройства (задатчики) с линейным и вращательным движением ползунка. Схема, приведенная на рис.2.9,в, обеспечивает получение двухполярного сигнала на выходе, а схемы на рис.2.9,г, д – однополярного.
Если ползунки потенциометров перемещать с помощью исполнительных двигателей, то они смогут выполнять функции задатчиков интенсивности.
В УБСР предусмотрен и статический (без применения двигателя) задатчик интенсивности типа ЗИ-2АИ. В этом устройстве, предназначенном для преобразования ступенчатого входного сигнала в линейно изменяющееся во времени выходное напряжение, применяются четыре ОУ, один из которых работает в режиме управляемого ограничения (рис.2.10,а), второй - в режиме интегратора (табл.2.1.), а третий и четвертый - в режиме инвертора.
К задающим элементам относятся устройства ввода задания (задатчики скорости, силы тока и т.д.) и задатчики интенсивности. По виду сигналов задающие элементы делятся на аналоговые и цифровые.
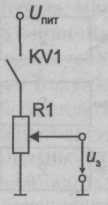
 ростейшими
задающими элементами являются
потенциометрические. Для электропривода
с малым диапазоном скорости используется
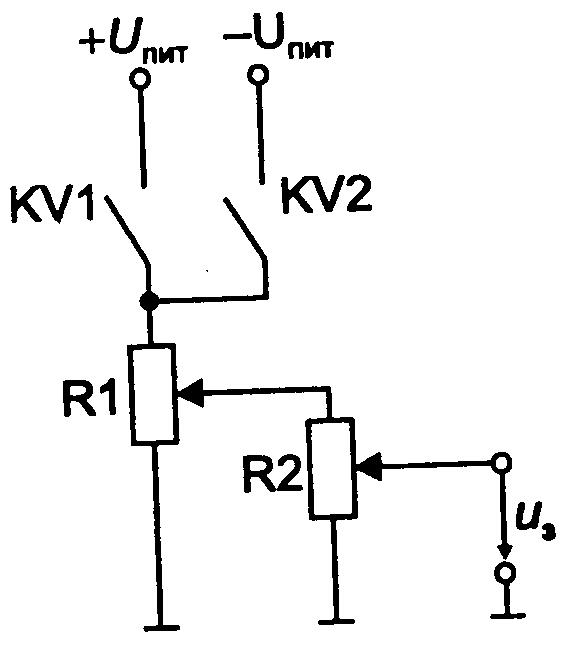
один потенциометр (рисунок 2.11,а), с
большим — два (рисунок 2.11,б). Потенциометр
R1
служит для грубого задания скорости,
а R2
— для точного. Для повышения точности
задания скорости задающие элементы
питаются стабилизированным напряжением
±UПИТ.
Как правило, UПИТ
= ±10 В.
ростейшими
задающими элементами являются
потенциометрические. Для электропривода
с малым диапазоном скорости используется
один потенциометр (рисунок 2.11,а), с
большим — два (рисунок 2.11,б). Потенциометр
R1
служит для грубого задания скорости,
а R2
— для точного. Для повышения точности
задания скорости задающие элементы
питаются стабилизированным напряжением
±UПИТ.
Как правило, UПИТ
= ±10 В.
а) б)
а) потенциометрический задатчик скорости с грубым заданием
б) потенциометрический задатчик скорости с точным заданием
Рисунок 2.11 – Потенциометрические задатчики скорости
Вместо потенциометров со скользящим контактом в электроприводе большой мощности используются бесконтактные задатчики скорости. Основой их являются бесконтактные сельсины и вращающиеся трансформаторы, выходное напряжение которых пропорционально углу поворота вала на требуемый угол.
В качестве цифровых задатчиков используются многопозиционные переключатели. Они представляют собой десятипозиционные (или более) переключатели сегментного типа с барабанным толкателем.
В качестве бесконтактного цифрового задатчика используется фотоэлектрический преобразователь перемещения, число импульсов на выходе которого пропорционально углу поворота вала на требуемый угол.
Задатчики интенсивности.
Устройство данного типа служат для получения необходимого сигнала изменения во времени, задающего сигнала системы управления, в частности задающего сигнала скорости двигателя в процессах разгона и торможения.
В простейшем случае задатчик интенсивности выполняются в виде элементарных R-C цепочек позволяющих плавно увеличивать сигнал Uвых (t) (рисунок 2.12).
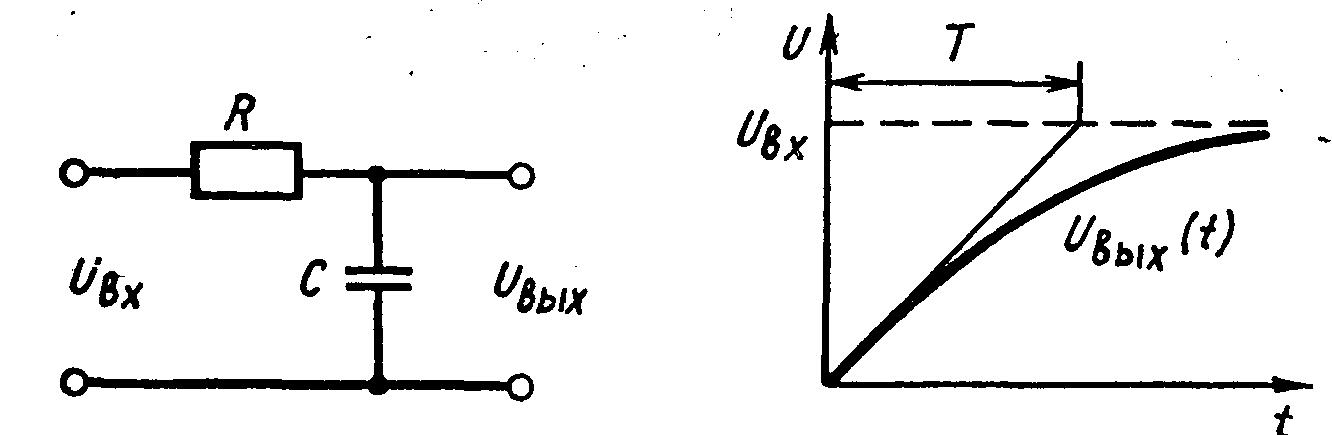
а) задатчик интенсивности
б) график изменения выходного сигнала задатчика интенсивности
Рисунок 2.12 – Задатчик интенсивности
При подаче на вход R-C цепочки ступенчатого входного сигнала Uвх, на её выходе Uвых будет изменяться по экспоненте. Изменяя постоянную времени Т (равную T=R∙C) можно получать различный темп изменения выходного сигнала. Более сложные задатчики интенсивности выполняются на базе операционных усилителей.