

6.5. Асинхронні шини
Хоча достатньо зручно використовувати синхронні шини завдяки дискретним тимчасовим інтервалам, тут все ж таки є деякі проблеми. Наприклад, якщо процесор і пам'ять здатні закінчити передачу 3,1 циклу, вони вимушені продовжити її до 4,0 циклів, оскільки неповні цикли заборонені.
Ще гірше то, що якщо одного разу був вибраний певний цикл шини і відповідно до нього були розроблені пам'ять і карти вводу-виводу, то в майбутньому важко робити технологічні удосконалення. Наприклад, припустимо, що через декілька років після випуску системи, зображеної на рис. 6.3, з'явилася нова пам'ять з часом доступу не 40, а 20 не. Це позбавило б нас від періоду очікування і збільшило швидкість роботи машини. Тепер уявимо, що з'явилася пам'ять з часом доступу 10 не. При цьому поліпшення продуктивності вже не буде, оскільки в даній розробці мінімальний час для читання — 2 цикли.
Якщо синхронна шина сполучає ряд пристроїв, одні з яких працюють швидко, а інші поволі, шина підстроюється під найповільніший пристрій, а швидші не можуть використовувати свій повний потенціал.
З цієї причини були розроблені асинхронні шини, тобто шини без задаючого генератора, як показано на рис. 6.4. Тут нічого не прив'язується до генератора. Коли задаючий пристрій встановлює адресу, MREQ RD і будь-який інший необхідний сигнал, вона видає спеціальний сигнал, який ми називатимемо MSYN (Master SYNchronization). Коли підлеглий пристрій одержує цей сигнал, воно починає виконувати свою роботу настільки швидко, наскільки це можливо. Коли робота закінчена, пристрій видає сигнал SSYN (Slave SYNchronization).
Сигнал SSYN означає для задаючого пристрою, що дані доступні. Він фіксує їх, а потім відключає адресні лінії разом з MREQ, RD і MSYN. Відміна сигналу MSYN означає для підлеглого пристрою, що цикл закінчений, тому пристрій відміняє сигнал SSYH, і все повертається до первинного стану, коли всі сигнали скасовані.
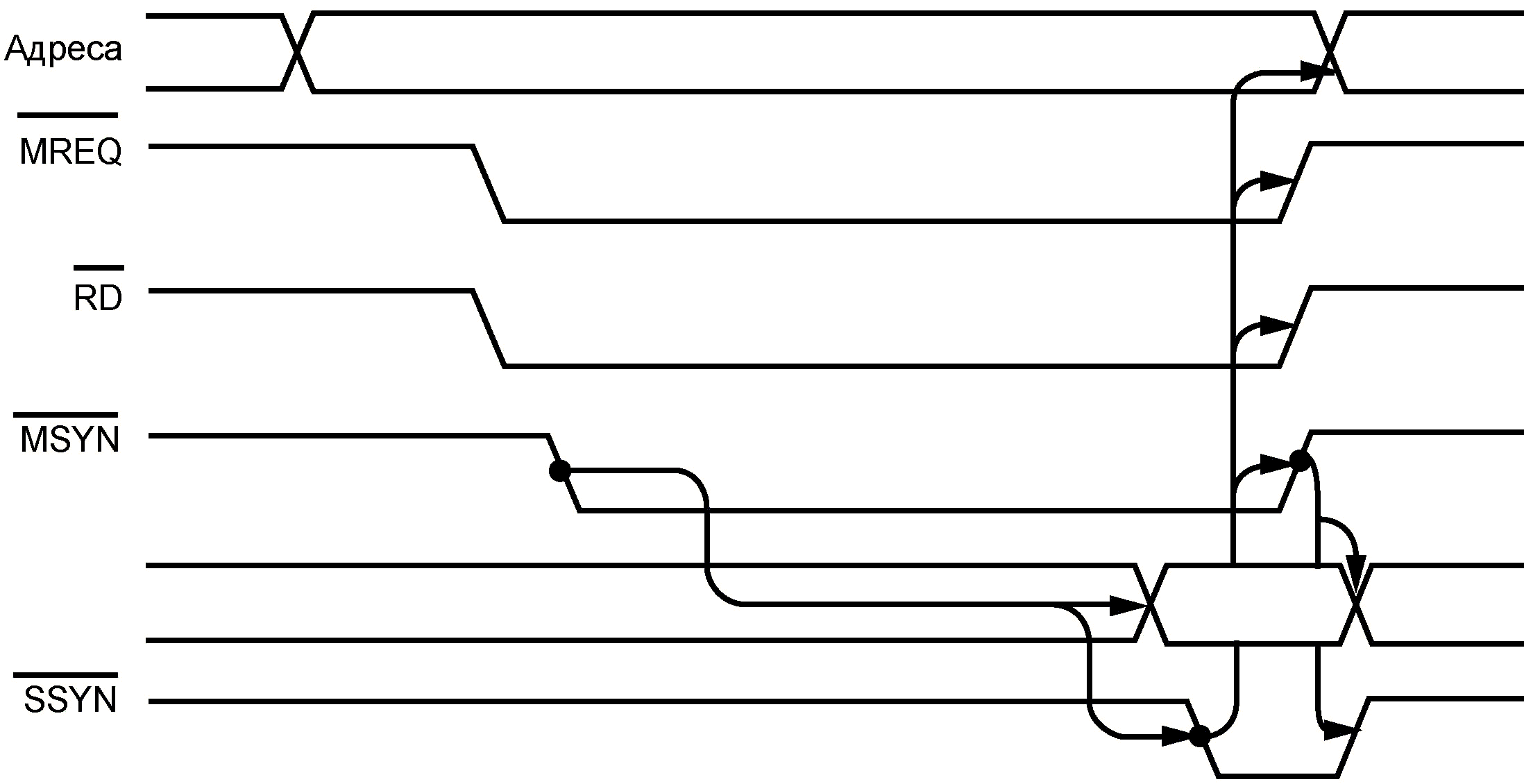
Рис. 6.4 – Робота асинхронної шини
Стрілки на тимчасових діаграмах асинхронних шин (а іноді і синхронних шин) показують причину і наслідок якої-небудь дії (рис. 6.4). Установка сигналу MSYN приводить до запуску інформаційних ліній, а також до установки сигналу SSYN. Установка сигналу SSYN, у свою чергу, викликає відключення адресних ліній, MREQ, З і MSYN. Нарешті, відключення MSYN викликає відключення SSYN, і на цьому процес прочитування закінчується.
Набір таких взаємообумовлених сигналів називається повним квитуванням. Тут, по суті, спостерігається 4 події:
1. Установка сигналу MSYN.
2. Установка сигналу SSYN у відповідь на сигнал MSYN.
3. Відміна сигналу NtSYN у відповідь на сигнал SSYN.
4. Відміна сигналу SSYN у відповідь на відміну сигналу MSYN.
Слід з'ясувати, що взаємообумовленість сигналів не залежить від синхронізації. Кожна подія викликається попередньою подією, а не імпульсами генератора. Якщо якась пара двох пристроїв (задаючого і підпорядкованого) працює поволі, це ніяк не вплине на наступну пару пристроїв, яка працює набагато швидше.
Переваги асинхронної шини очевидні, але насправді більшість шин є синхронними. Річ у тому, що синхронну систему побудувати простіше, ніж асинхронну. Центральний процесор просто видає сигнали, а пам'ять просто реагує на них. Тут немає ніякого причинно-наслідкового зв'язку, але якщо компоненти вибрані вдало, все працюватиме і без квитування. Крім того, в розробку синхронних шин зроблено дуже багато вкладень.