

5.3. Синхронні d-защіпки
Щоб позбутися невизначеності SR-защіпки (невизначеність виникає у випадку, якщо S=R=1), потрібно запобігти появі подібної невизначеності. На рис. 5.3 зображена схема защіпки тільки з одним входом D. Так як вхідний сигнал у нижній вентиль І завжди є інверсним кодом вхідного сигналу у верхній вентиль І, ситуація, коли обидва входи рівні 1, ніколи не виникає. Коли D=l і синхронізуючий вхід дорівнює 1, защіпка переходить у стан Q=l. Коли D=0 і синхронізуючий вхід дорівнює 1, защіпка переходить у стан Q=0. Іншими словами, коли синхронізуючий вхід дорівнює 1, поточне значення D вилучається і зберігається в защіпці. Така схема називається синхронною D-защіпкою, і являє собою пам'ять об’ємом 1 біт. Значення, яке було збережено, завжди доступне на виході Q. Щоб завантажити в пам'ять поточне значення D, потрібно задати позитивний імпульс по лінії синхронізуючого сигналу.
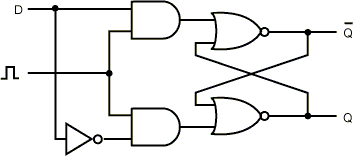
Рис. 5.3 - Синхронна D – защіпка
Така схема вимагає наявності 11 транзисторів. Більш складні схеми можуть зберігати 1 біт, маючи всього 6 транзисторів.
5.4. Тригери (flip-flops)
Багато схем вилучають значення на визначеній лінії у певний момент часу і запам'ятовують його. У такій схемі, що називається тригером, перехід стану відбувається не тоді, коли синхронізуючий сигнал дорівнює 1, а під час переходу синхронізуючого сигналу з 0 на 1 (наростаючий фронт) або з 1 на 0 (задній фронт). Отже, довжина синхронізуючого імпульсу не має значення, оскільки переходи відбуваються швидко.
Підкреслимо ще раз розходження між тригером і защіпкою. Тригер запускається фронтом сигналу, а защіпка запускається рівнем сигналу.
Існує кілька підходів до розробки тригерів. Наприклад, якби існував спосіб генерування дуже короткого імпульсу на наростаючому фронті синхронізуючого сигналу, цей імпульс можна було б подавати у D-защіпку. Такий спосіб існує. Відповідна схема показана на рис. 5.4 а.

а) б)
Рис. 5.4 - Генератор імпульсу (а); часова діаграма для чотирьох точок на схемі (б)
Може здатися, що вихід вентиля І завжди буде нульовим, оскільки функція І від будь-якого сигналу з його інверсією дає 0, але насправді ситуація більш тонка. При проходженні сигналу через інвертор відбувається невелика, але все-таки не нульова затримка. Дана схема працює саме завдяки цій затримці. Припустимо, що вимірюється напруга в чотирьох точках а, b, с і d. Вхідний сигнал у точці а являє собою довгий синхронізуючий імпульс (див. нижній графік на рис. 5.4 б. Сигнал у точці b показаний над ним. Відзначимо, що цей сигнал інвертований і подається з деякою затримкою. Час затримки залежить від типу інвертора і, як правило, складає кілька наносекунд.
Сигнал у точці с також подається із затримкою, але ця затримка зумовлена тільки часом проходження сигналу (зі швидкістю світла). Якщо фізична відстань між а і с, наприклад, 20 мікрон, тоді затримка на поширення сигналу складає 0,0001 нс, що, як правило, є незначною величиною у порівнянні із часом, що необхідний на проходження сигналу через інвертор. Таким чином, сигнал у точці с практично ідентичний сигналу в точці а.
Коли вхідні сигнали b і с піддаються операції І, у результаті виходить короткий імпульс, довжина якого (Δ) дорівнює вентильній затримці інвертора (як правило 5 нс і менше). Вихідний сигнал вентиля І – це даний імпульс, зміщений внаслідок затримку вентиля І (див. верхній графік на рис. 5.4 б. Це часове зміщення означає тільки те, що D-защіпка активізується із визначеною затримкою після наростаючого фронту синхронізуючого імпульсу. Він ніяк не впливає на довжину імпульсу. У пам'яті з часом циклу в 50 нс імпульс у 5 нс (який повідомляє, коли потрібно вибирати лінію D) досить короткий, і в цьому випадку повна схема може бути такою, яка зображена на рис. 5.5.
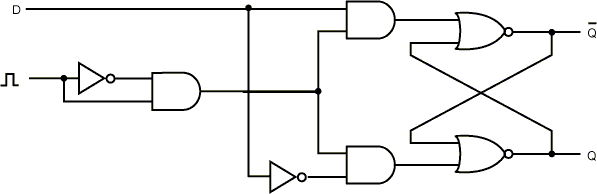
Рис. 5.5 - D-тригер
Стандартні зображення защіпок і тригерів показані на рис. 5.6. На рис. 5.6, а зображена защіпка, стан якої завантажується тоді, коли синхронізуючий сигнал СК (від слова clock) дорівнює 1, на противагу защіпці, зображеної на рис. 5.6 б, у якої синхронізуючий сигнал звичайно дорівнює 1, але переходить на 0, щоб завантажити стан з D. На рис. 5.6 в і г зображені тригери. Те, що це тригери, а не защіпки, показано за допомогою кутиків при синхронізуючому вході. Тригер на рис. 5.6 в змінює стан на наростаючому фронті синхронізуючого імпульсу (перехід від 1 до 0), тоді як тригер на рис. 5.6 г змінює стан на задньому фронті (перехід від 0 до 1). Більшість защіпок і тригерів також мають вихід , а в деяких є два додаткових входи: Set (установка) або Preset (попередня установка) і Reset (скидання) або Clear (очищення). Перший вхід (Set або Preset) установлює Q=1, а другий (Reset або Clear) – Q=0.