

3 Входи і 8 виходів
вони не рівні. Схема ґрунтується на вентилі ВИКЛЮЧНЕ АБО, що видає 0, якщо сигнали на вході рівні, і 1, якщо сигнали на вході не рівні. Якщо всі чотири вхідних слова рівні, усі чотири вентилі ВИКЛЮЧНЕ АБО повинні видавати 0. Ці чотири сигнали потім надходять у вентиль АБО. Якщо в результаті виходить 0, отже, слова, що надійшли на вхід, рівні; у противному випадку вони не рівні. У нашому прикладі використовувався вентиль АБО як кінцева стадія, щоб поміняти значення отриманого результату: 1 означає рівність, а 0 – нерівність.
Програмувальні логічні матриці. Будь-яку функцію (таблицю істинності) можна представити у вигляді суми добутків і, отже, втілити у схеми, використовуючи вентилі І і АБО. Для обчислення сум добутків служить так звана програмувальна логічна матриця (рис. 4.14). Ця мікросхема містить входи для 12 змінних. Додаткові сигнали (інверсії) генеруються всередині самої мікросхеми. У підсумку усього виходить 24 вхідних сигналів. Який саме вхідний сигнал надходить у визначений вентиль І, визначається за матрицею 24x50 біт. Кожна з вхідних ліній до 50 вентилів І містить плавку перемичку. При випуску з заводу всі 1200 перемичок залишаються недоторканими. Щоб запрограмувати матрицю, покупець випалює обрані перемички, прикладаючи до схеми високу напругу.

Мал 4.13 - Простий чотирьохрозрядний компаратор
Вихідна частина схеми складається із шести вентилів АБО, кожний з яких містить до 50 входів, що відповідає наявності 50 виходів у вентилів І. Які з потенційно можливих зв'язків дійсно існують, залежить від того, як була запрограмована матриця 50x6. Мікросхема має 12 вхідних виводів, 6 вихідних виводів, живлення і «землю» (тобто всього 20 виводів).
Наведемо приклад використання програмувальної логічної матриці. Розглянемо схему, зображену на рис. 4.3 б. Вона містить три входи, чотири вентилі І, один вентиль АБО і три інвертори. Якщо запрограмувати матрицю певним чином, вона зможе обчислювати ту ж функцію, використовуючи три з 12 входів, чотири з 50 вентилів І і один з 6 вентилів АБО. (Чотири вентилі І повинні обчислювати BC, A C, AB і ABC; вентиль АБО приймає ці 4 добутки в якості вхідних даних.) Можна зробити так, щоб та ж програмувальна логічна матриця обчислювала одночасно суму чотирьох функцій однакової складності. Для простих функцій обмежуючим фактором є кількість вхідних змінних, для більш складних – вентилі І і АБО.
Матриці, програмувальні в умовах експлуатації, усе ще використовуються. Однак перевага віддається матрицям, що виготовляються на замовлення. Вони розробляються замовником і випускаються виробником відповідно до запитів замовника. Такі програмувальні логічні матриці набагато дешевші.
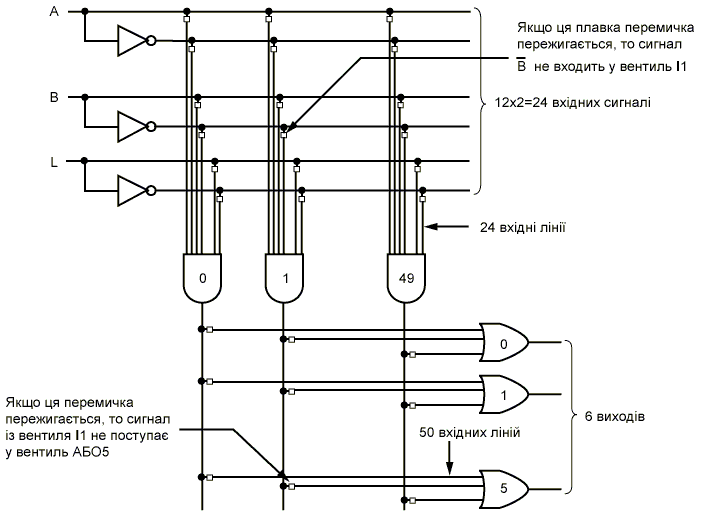
Рис. 4.14 - Програмувальна логічна матриця з 12 входами і 6 виходами. (Маленькі квадратики – плавкі перемички, що випалюються для завдання функції, яку потрібно обчислити. Плавкі перемички упорядковуються в двох матрицях. Верхня матриця – для вентилів І, а нижня матриця – для вентилів АБО)
Існує три різних способи втілення таблиці істинності, приведеної на рис. 4.3 а. Якщо в якості компонентів використовувати МІС, потрібно 4 мікросхеми. З іншого боку, можна обійтися одним мультиплексором, побудованим на СІС, як показано на рис. 4.11 б. Нарешті, можна використовувати лише четверту частину програмувальної логічної матриці. Очевидно, якщо необхідно обчислювати багато функцій, використання логічної матриці, що програмується більш ефективно, чим застосування двох інших методів. Для простих схем найкраще використовувати більш дешеві МІС і СІС.