

2.4. Диаграммы движения рабочего органа.
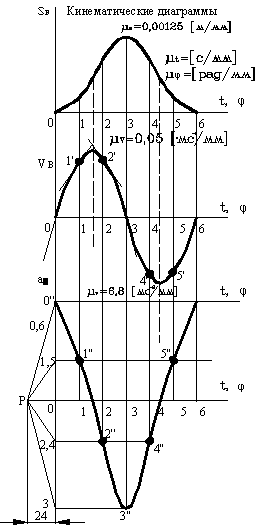
Кинематические диаграммы представляют собой графики зависимости пути S(t), скорости V(t) и ускорения a(t) от времени для точек звеньев.
В
курсовой работе за такую точку принимается
точка рабочего органа (звена 3 или 5).
Диаграммы строятся в прямоугольной
системе координат. По оси абсцисс
откладывают отрезок, представляющий
собой в масштабе ![]() период ведущего звена (время одного
оборота), а по оси ординат – отрезки,
которые в масштабе представляют собой
путь , скорость и ускорение заданной
точки в данный момент времени.
период ведущего звена (время одного
оборота), а по оси ординат – отрезки,
которые в масштабе представляют собой
путь , скорость и ускорение заданной
точки в данный момент времени.
Все три диаграммы располагаются одна над другой и могут быть построены следующим методом :
Графическим (используем планы положений и скоростей);
Методом графического дифференцирования.
По решению руководителя кинематические диаграммы могут строиться по одному из двух вариантов.
Вариант 1.
Строится диаграмма S(t), используя планы положений механизма;
Строятся диаграммы V(t) графическим дифференцированием (метод хорд или касательных) графика S(t);
Строится диаграмма a(t) графическим дифференцированием графика V(t).
Вариант 2:
Строятся диаграммы S(t) и V(t) используя для этого планы скоростей и положений соответственно
Строится диаграмма а(t) графическим дифференцированием (метод касательных или хорд)
Пример: Построить кинематические диаграммы пути для точки B звена 3 механизма поршневого компрессора (рис). Решение проведем в общем виде.
Решение
Построение диаграммы пути
 (t)
(t)
По оси абсцисс откладываем отрезок, выражающий время одного оборота кривошипа. Длину отрезка принимать порядка 180….240 мм, для получения выразительных графиков.
Делим этот отрезок на равные части, число которых (6, 8,12) равно числу положений механизма;
Определяем масштаб по оси t. Например при 6-и планах положений:
 ,
где Т – время одного оборота кривошипа;
,
где Т – время одного оборота кривошипа;
 –
размер в мм, изображающий данный период
в масштабе.
–
размер в мм, изображающий данный период
в масштабе.
Примечание: Если по оси абсцисс откладываем не время а углы φ поворота кривошипа, то масштаб

По оси ординат откладываем отрезки
 ,
,
 и т.д. равные расстояния точки B
от своего крайнего положения (
и т.д. равные расстояния точки B
от своего крайнего положения ( )
в масштабе
)
в масштабе  .
Если ход точки В на планах положений
.
Если ход точки В на планах положений
 ,
то можно применить
,
то можно применить  .
В противном случае увеличиваем отрезки
в «К» раз так, чтобы получить
.
В противном случае увеличиваем отрезки
в «К» раз так, чтобы получить  .
При этом масштаб диаграммы скоростей
будет равен :
.
При этом масштаб диаграммы скоростей
будет равен :
![]()
Построение диаграмм графическим дифференцированием. Рассмотрим пример построения диаграммы ускорений точки В
 графическим дифференцированием графика
скорости
графическим дифференцированием графика
скорости  методом хорд (рис )
методом хорд (рис )
Порядок:
В точках
 график
а
проводим касательные к кривой.
график
а
проводим касательные к кривой.Откладываем на оси абсцисс диаграммы влево от начала координат произвольной длинны отрезок OP, называемый полюсным расстоянием, а точка P – полюсом.
Примечание:
для получения графика
приемлемых размеров (максимальная
ордината ![]() ).
Для определения положения полюса P
следует провести прямую линию, параллельную
самой круто наклоненной касательной
так, чтобы она пересекала продолжение
оси t
в точке P
и ось ускорений
).
Для определения положения полюса P
следует провести прямую линию, параллельную
самой круто наклоненной касательной
так, чтобы она пересекала продолжение
оси t
в точке P
и ось ускорений
Размер OP = H (мм) будет полюсным расстоянием.
Из точки P проводим лучи P-1,P-2 и т.д. параллельные касательным до пересечения с осью ординат;
От полученных на оси ординат точек проводим прямые, параллельные оси абсцисс, до пересечения с соответствующими ординатами (__ и т.д.);
Полученные точки и т.д. соединяем плавной кривой, которая представляет диаграмму ускорений
 )
)Масштаб оси ординат находится по формуле:
![]()
Если по оси абсцисс отложены углы поворота кривошипа, то масштаб

Примечание : Ели, по решению руководителя, используется вариант 1 построения кинематических диаграмм, то после построения графика перемещения (t).
Он графически дифференцируется точно так же как описано выше, и получается график скорости .
Масштаб скорости определяется зависимостью
![]() ,
где
,
где![]() -
полюсное расстояние (мм);
-
полюсное расстояние (мм);
Вторичное
дифференцирование позволяет получить
график ускорений
).
Масштаб при этом ![]() ,
где
,
где ![]() - полюсное расстояние.
- полюсное расстояние.