

Задание.
Определить параметры обмотки индуктивного датчика используя формулы (14)-(17) и исходные данные из таблицы 4, согласно варианту.
Таблица 4.
№ варианта |
SM, м2 |
δв, м |
I, А |
Δдоп, А/мм |
U, В |
f, Гц |
1 |
5*10-4 |
3*10-2 |
0,01 |
4 |
220 |
400 |
2 |
3*10-4 |
3*10-2 |
0,01 |
3,5 |
220 |
400 |
3 |
4*10-4 |
3*10-2 |
0,02 |
3,5 |
220 |
400 |
4 |
5,5*10-4 |
9*10-2 |
0,015 |
3,5 |
220 |
400 |
5 |
5,5*10-4 |
7*10-2 |
0,025 |
4 |
220 |
400 |
Задача №4. Расчет основных параметров емкостного датчика угловых перемещений.
Краткие теоретические сведения.
Емкостным датчиком называют преобразователь параметрического типа, в котором изменение измеряемой величины преобразуется в изменение емкостного сопротивления. Емкостной датчик угловых перемещений имеет вид.
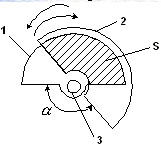
1 – подвижная обкладка, 2 – неподвижная обкладка, 3 – вал, S – площадь взаимодействия между пластинами, α – угол поворота
Рис.4. Емкостной датчик угловых перемещений.
Максимальная емкость датчика при а=180 равна:
![]() (Ф),
(18)
(Ф),
(18)
Где Smax – площадь взаимодействия между подвижной и одной из неподвижных пластин;
Cmax – максимальная емкость;
d – расстояние между пластинами;
тогда общее количество подвижных и неподвижных пластин
![]() (штук),
(19)
(штук),
(19)
полученное число округляем до целых.
Чувствительность датчика:
![]() ,
(20)
,
(20)
Задание.
Определить основные параметры емкостного датчика перемещений используя формулы (18)-(20) и исходные данные из таблицы 5.
Таблица 5.
№ варианта |
Smax, см2 |
Cmax, пФ |
d, мм |
1 |
12 |
400 |
0,5 |
2 |
10 |
200 |
0,6 |
3 |
15 |
600 |
0,4 |
4 |
18 |
830 |
0,8 |
5 |
15 |
440 |
0,9 |
Контрольные вопросы.
Каковы преимущества и недостатки потенциометрических датчиков?
Почему погрешность потенциометрического датчика ступенчатая?
От чего зависит ЭДС термоэлектрического датчика?
Области применения потенциометрических и термоэлектрических датчиков.
Объясните цепь преобразований в индуктивном датчике.
Достоинства и недостатки индуктивных датчиков.
Для чего предназначены и как работают емкостные датчики?
Практическая работа №2.
Определение основных параметров электромагнитного реле постоянного тока.
Задача №1. Расчет параметров электромагнитного реле постоянного тока.
Краткие теоретические сведения.
Реле – устройство, автоматически осуществляющее скачкообразное переключение выходного сигнала под воздействием управляющего сигнала, изменяющегося непрерывно в определенных пределах. По роду используемого тока реле делятся на реле постоянного и переменного тока. Первые в свою очередь делятся на нейтральные и поляризованные реле.
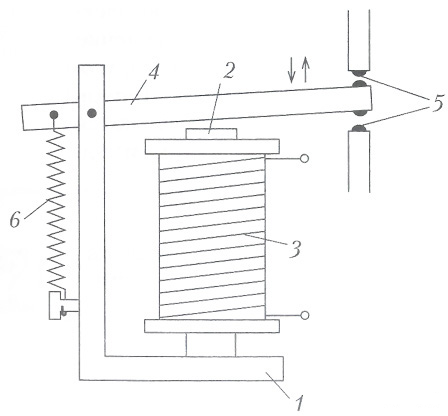
1 — стойка; 2 — сердечник; 3 — катушка; 4 — якорь; 5 — контакты; 6 — пружина
Рис.1. Устройство электромагнитного реле постоянного тока.
Площадь воздушного зазора:
![]() (мм2),
(1)
(мм2),
(1)
где Sδ – площадь воздушного зазора;
D – диаметр катушки.
Величина магнитного потока:
![]() (Вб),
(2)
(Вб),
(2)
где F – намагничивающая сила
Магнитная индукция:
![]() (Тл),
(3)
(Тл),
(3)
Магнитное напряжение, приходящееся на зазор:
![]() (А),
(4)
(А),
(4)
где μ0 = 4* π*10-7 – магнитная проницаемость.