

2.1.4 Принципиальная схема регулятора
Для
технической реализации регулятора
необходимо использовать операционные
усилители. В рассмотренном примере для
передаточной функции регулятора вида
 одна из возможных принципиальных схем
будет иметь вид, представленный на рис.
21.
одна из возможных принципиальных схем
будет иметь вид, представленный на рис.
21.
Рис. 21 Принципиальная схема регулятора положения
Параметры схемы определяются из соотношений:

Другой вариант схемы
Рис. 21 Принципиальная схема регулятора
Данная схема соответствует передаточной функции регулятора вида:
Параметры схемы – номиналы сопротивлений и емкости можно получить из следующих соотношений.

При выборе величины емкости следует стремиться к тому, чтобы она не превышала единиц микрофарад.
3. Оценка качества спроектированной системы
Оценка качества системы осуществляется методом моделирования на персональном компьютере в лаборатории института. Для самостоятельного решения задачи возможно использование готовых программных продуктов (МВТУ, Simulink, MATRIX, VisSim и др.).
Необходимо провести исследование системы, в процессе которого необходимо:
1) ответить на вопрос «Обеспечивает ли спроектированная система заданное значение критерия качества (точность) и ограничениям (время переходного процесса, перерегулирование)?
2) Построить зависимости точности следящей системы, быстродействия (времени переходного процесса), перерегулирования от коэффициента передачи регулятора.
3) Определить допустимый диапазон изменения коэффициента усиления регулятора, в котором выполняются все заданные требования и ограничения.
При оценке точности на входе формируется эквивалентное гармоническое воздействие Хвх(t) = АэSin(ωэt), где Аэ= ω2max /εmax, ωэ = εmax/ ωmax (см. конспект).
Аэ= ω2max /εmax=1,072/0,5=2,28
ωэ = εmax/ ωmax = 0,46
При оценке параметров переходного процесса (времени переходного процесса и перерегулирования) на вход системы задаётся ступенчатое воздействие вида 1(t).
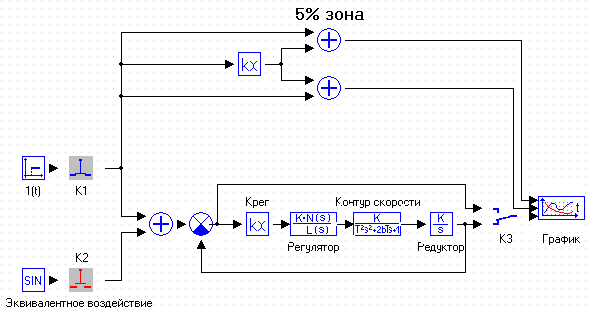
Рис. 1 Схема моделирования следящей системы в ПК МВТУ
Принципы построения таких схем и оформления результатов приведены в методических указаниях к проведению лабораторных работ по дисциплине «Моделирование систем».
Исследование системы следует начать с установки параметров динамических звеньев.
Передаточная
функция блока «Регулятор»
 ,
в числителе устанавливается меньшая
постоянная, в знаменателе большая.
Большая постоянная Т1=1,72,
меньшая Т2=0,25
,
в числителе устанавливается меньшая
постоянная, в знаменателе большая.
Большая постоянная Т1=1,72,
меньшая Т2=0,25

Рис. 2 установка параметров регулятора
Коэффициент передачи регулятора устанавливается в блоке «Крег».
Начальное значение Крег устанавливается меньше расчетного значения, для того чтобы определить границу допустимых значений Крег.
В блоке «Контур скорости» коэффициент усиления устанавливается равным Кос-1, в нашем примере 15,7, постоянная времени Т=ТΣ1√2=2ТΣ2√2 в нашем примере Т=0,011. Коэффициент демпфирования при настройке регулятора скорости на ОМ ξ=0,707. В блоке «Редуктор» коэффициент усиления
Кред=1/i=0.0055 (i – передаточное число редуктора, которое рассчитано при выполнении первой части проекта при выборе двигателя).
Параметры эквивалентного гармонического воздействия определяются следующим образом:

Эти параметры следует установить в блоке «SIN», следующим образом, например в рассмотренном в конспекте случае:

Рис. 3 Установка параметров эквивалентного воздействия
В результате исследования необходимо определить допустимый диапазон изменения коэффициента передачи регулятора. При исследовании определяются: максимальная ошибка Q(в этом режиме ключ К1 разомкнут, К2 замкнут, К3 в верхнем положении) ; время переходного процесса tпп; перерегулирование σ (в этом режиме ключ К1 замкнут, К2 разомкнут, К3 в нижнем положении). Рекомендуемые настройки окна «Параметры счета»: Рунге-Кутта 45; «Время интегрир.» 1с; «Минимальный шаг интегрирования» 1е-10; «Максимальный шаг» 0,001; «Шаг вывода результатов» 0,001; «Относительная точность» 0,01.
При исследовании необходимо заполнить форму 1.
Крег |
600 |
800 |
1000 . . |
1200 |
1400 |
|
1600 |
|
|
|
|
tпп |
0,42 |
0,35 |
0,13 |
0,11 |
0,10 |
|
0,09 |
|
|
|
|
|
1,23 |
0,78 |
0,33 |
0,30 |
0,28 |
|
0,26 |
|
|
|
|
σ |
6 |
4 |
7 |
15 |
20 |
|
25 |
|
|
|
|
|
0,24 |
0,16 |
0,3 |
0,6 |
0,8 |
|
1 |
|
|
|
|
Q |
0,0022 |
0,0166 |
0,0136 |
0,011 |
0,009 |
|
0,008 |
|
|
|
|
|
0,075 |
0,065 |
0,044 |
0,037 |
0,031 |
|
0,028 |
|
|
|
|


Форма 1
В
таблице:
 (1)
(1)
Где
 исходные данные для проектирования.
исходные данные для проектирования.
По результатам исследования необходимо в одной системе координат, где аргументом является Крег, а функциями:


Нормирование результатов по формулам (1) необходимо для удобства построения и интерпретации результатов. Пример оформления результатов приведен на рис. 2. Графики построены в среде Excel. По полученному рисунку просто определяется допустимый диапазон изменения Крег (показан вертикальными прерывистыми линиями). Именно в этом диапазоне выполняется не только требование к системе по точности, но и ограничения на время переходного процесса и перерегулирование.
Рис.2 результаты исследования
Содержание: