

Тема 3 Деталі і вузли вантажопідіймальних машин.
3.1 Поліспасти
3.1.1 Загальні відомості.
Поліспастами називають механізми, які представляють собою систему рухомих і нерухомих блоків, послідовно охоплених канатом, або ланцюгом. Поліспасти застосовують для виграшу в силі або у швидкості.
Поліспасти першого виду називають силовими поліспастами прямої дії, поліспасти другого виду – швидкісними поліспастами оберненої дії.
Застосування силових поліспастів зменшує зусилля натягу в тягових органах підйомної машини і як наслідок, приводить до зменшення габаритів і потужності приводу тягового барабана. Враховуючи цю властивість, у механізмах підйому вантажу, у механізмах переміщення кранового візка і зміни вильоту стріли з канатною тягою, застосовуються тільки силові поліспасти. В силових поліспастах швидкість підйому ватажу або переміщення візка та стріли менша лінійної швидкості тягового органу при намотуванні на барабан, тобто виграш у силі приводить до програшу у швидкості.
У деяких підйомних машинах, наприклад, в гідравлічних і пневматичних підйомниках, потрібно забезпечити значні швидкості переміщення вантажу при малих швидкостях тягового елемента привода (шток пневмо – або гідроциліндра). В цьому випадку застосовують швидкісні поліспасти.
Як уже було сказано вище, в поліспаст входять нерухомі і рухомі блоки. Нерухомим називається блок, вісь якого не переміщається разом з вантажем при його підйомі і опусканні.
Рухомим блоком називається блок, вісь якого переміщається разом з вантажем.
У залежності від числа віток тягового органу, які намотуються (набігають) на барабан силові поліспасти бувають двох типів: одинарні і здвоєні. При одинарному типі поліспаста на барабан набігає одна вітка тягового органу, при здвоєному - дві вітки.
Одинарні поліспасти застосовуються в тих випадках, коли тяговий орган намотується на барабан через направляючий блок, встановлений на металоконструкції або на кінці стріли ПМ.
Якщо тяговий орган намотується на барабан безпосередньо (механізми підйому кранів з візками), то необхідно забезпечити строго вертикальний підйом вантажу. В цих випадках застосовують здвоєні поліспасти, які складаються з двох одинарних поліспастів із зрівняльним блоком. Зрівняльний блок не обертається і призначений для вирівнювання довжин правої і лівої віток каната.
П
 риведемо
деякі кінематичні схеми поліспастів.
На рис.3.1 наведена схема силового
одинарного поліспаста, на рис.3.2 – схема
силового здвоєного поліспаста, на
рис.3.3 – схема швидкісного поліспаста.
На рис.3.4 наведено ще декілька кінематичних
схем вантажопідіймальних машин.
риведемо
деякі кінематичні схеми поліспастів.
На рис.3.1 наведена схема силового
одинарного поліспаста, на рис.3.2 – схема
силового здвоєного поліспаста, на
рис.3.3 – схема швидкісного поліспаста.
На рис.3.4 наведено ще декілька кінематичних
схем вантажопідіймальних машин.
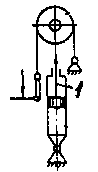
1 –шток.
Рисунок 3.3 Кінематична схема швидкісного поліспаста.
а)
б)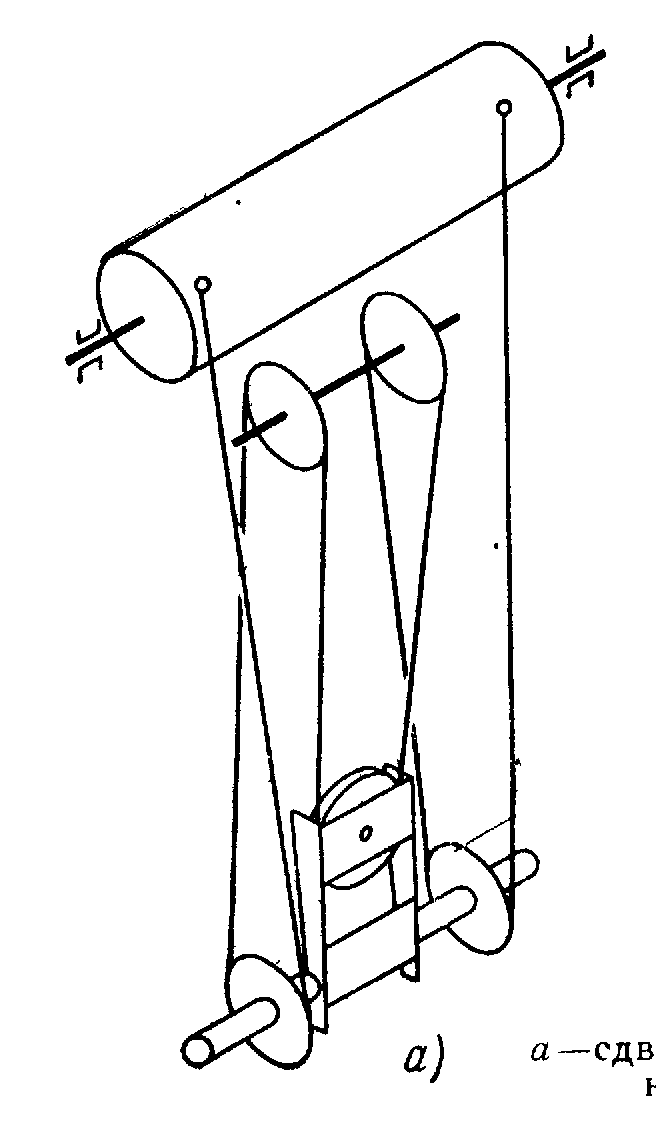

в)
г)
д)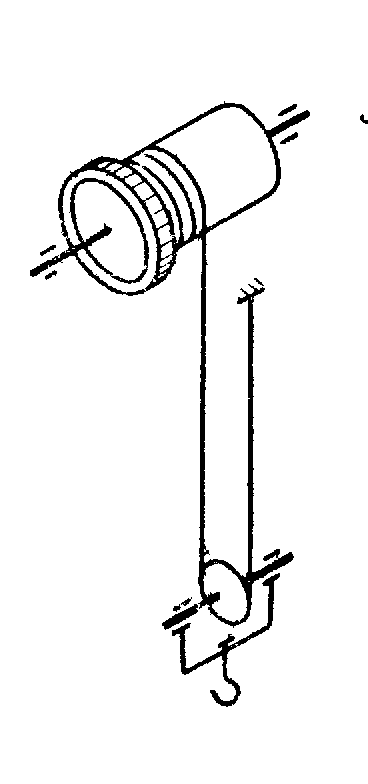


е)
є)

Рисунок
3.4 - Кінематичні схеми поліспастів
вантажопідіймальних машин
3.1.2 Основні параметри поліспастів.
Основними параметрами поліспаста є передаточне відношення іП, коефіцієнт корисної дії П і максимальне cтатичне зусилля натягу каната FСТ.МАХ.
Передаточне відношення іП, яке ще називається кратністю поліспаста, для силових поліспастів визначається в напрямі передачі потужності від вала барабана до вантажозахоплюючого пристрою
![]() (3.1)
(3.1)
де V1 – швидкість підйому вантажу;
VБ – швидкість каната, намотаного на барабан.
Н а
рис.3.5 приведена схема силового одинарного
поліспаста з картинами векторів
швидкостей каната на блоках.
а
рис.3.5 приведена схема силового одинарного
поліспаста з картинами векторів
швидкостей каната на блоках.
На рис.3.6 приведена схема силового здвоєного поліспаста з картинами векторів швидкостей каната на блоках.
а – схема поліспаста; б – картина векторів
швидкостей рухомого блока 1; в - картина
векторів швидкостей нерухомого блока
2; г - картина векторів швидкостей рухомого
блока 3.
– схема поліспаста; б – картина векторів
швидкостей рухомого блока 1; в - картина
векторів швидкостей нерухомого блока
2; г - картина векторів швидкостей рухомого
блока 3.
Рисунок 3.6 - Схема силового здвоєного поліспаста з картинами векторів швидкостей каната на блоках.
З рис. 3.5,б видно, що
![]() (3.2)
(3.2)
де R1 – радіус блока 1.
З рис. 3.5,г, при V2=2V1, BPV=2PVO3. Враховуючи, що BPV+PVO3=R3, одержимо
![]() (3.3)
(3.3)
Визначимо кратності поліспастів, рис.3.5 і 3.56
![]() (3.4)
(3.4)
![]() (3.5)
(3.5)
Як видно з формул (3.4) і (3.5), кратність поліспаста можна визначити за формулою
![]() (3.6)
(3.6)
де ZК – число віток тягового органу, на яких підвішений вантаж;
ZБ –. число віток тягового органу, які набігають на барабан.
Для силових одинарних поліспастів - ZБ=1, для здвоєних - ZБ=2.
Н а
рис.3.7 приведена схема силового здвоєного
поліспаста з трьома рухомими блоками.
Для такого поліспаста середній рухомий
блок є зрівняльним (нерухомим).
а
рис.3.7 приведена схема силового здвоєного
поліспаста з трьома рухомими блоками.
Для такого поліспаста середній рухомий
блок є зрівняльним (нерухомим).
Рисунок 3.7 - Схема силового здвоєного поліспаста з трьома рухомими блоками та картинами векторів швидкостей каната на блоках.
Кратність такого поліспаста визначається за формулами
![]() (3.7)
(3.7)
![]() (3.8)
(3.8)
Як видно з рис. 3.6 і 3.7 в здвоєних поліспастах зрівняльні (нерухомі) блоки завжди розміщуються по осі симетрії поліспаста, а найбільш зручною формулою для визначення кратності поліспаста є формула (3.6).
Для визначення передаточного відношення швидкісного поліспаста розглянемо рис.3.8 на приведена схема швидкісного поліспаста з картинами векторів швидкостей каната блоках.
Згідно цього рисунка кратність поліспаста визначається за формулою
![]() , (3.9)
, (3.9)
де VШ – швидкість руху штока привода.
Визначимо кратність швидкісного поліспаста через відношення віток каната. Кількість віток каната, на яких підвішений вантаж, для швидкісного поліспаста завжди рівна 1, тобто ZК=1. Кількість віток каната, які переміщають шток привода, рівна 4, ZШ=4.
По аналогії з силовими поліспастами, при ZБ ZШ, за форму-лою (3.6) одержимо
![]() (3.10)
(3.10)
Для визначення коефіцієнта корисної дії силового одинарного поліспаста, на рис.3.9, приводимо його розгорнуту схему
Коли поліспаст знаходиться в стані спокою то зусилля в кожній вітці каната рівне
![]() (3.11)
(3.11)
При підійманні вантажу внаслідок втрат від сил тертя в опорах блоків і сил опору, які виникають при згині каната або ланцюга певної жорсткості, розподіл зусиль між вітками каната нерівномірний.
При підійманні вантажу
F1>F2>…>FZ (3.12)
а – схема поліспаста; б – картина векторів
швидкостей рухомого блока 1; в - картина
векторів швидкостей нерухомого блока
2; г - картина векторів швидкостей рухомого
блока 3.
– схема поліспаста; б – картина векторів
швидкостей рухомого блока 1; в - картина
векторів швидкостей нерухомого блока
2; г - картина векторів швидкостей рухомого
блока 3.
Рисунок 3.8 - Схема швидкісного поліспаста з картинами векторів швидкостей каната на блоках.