

Траектория (ход) луча
Одной из наиболее главных задач геометрической оптики является расчет хода луча. Под этим термином подразумевается нахождение траектории луча по оптической системе. Оптическая система же представляет собой ряд подпространств, ограниченных некоторыми поверхностями и заполненных однородными (иное специально оговаривается) средами с различными показателями преломления. Определим основные математические зависимости для такого расчета на основе уже сделанного физического обоснования. Ими являются траектория луча в среде между поверхностями и изменение направления на поверхностях - границах сред.
Рассмотрим
уравнение эйконала (5.5)
![]() .
По определению
.
По определению
![]() перпендикулярен
волновой поверхности
перпендикулярен
волновой поверхности
![]() (что,
собственно и выражает это уравнение)
и, соответственно, является касательным
к лучу, т.е.
(что,
собственно и выражает это уравнение)
и, соответственно, является касательным
к лучу, т.е.
|
(6.1) |
так
как
![]() .
Таким образом уравнение эйконала можно
записать в виде
.
Таким образом уравнение эйконала можно
записать в виде
|
(6.2) |
Если
это уравнение продифференцировать по
![]() ,
то (6.2) примет вид
,
то (6.2) примет вид
|
(6.3) |
![]() можно преобразовать
следующим образом:
можно преобразовать
следующим образом:
|
(6.4) |
Умножая
обе стороны уравнения эйконала (5.5)
скалярно на
и
учитывая, что
![]() ,
получим, что
,
получим, что
![]() .
Подставляя в (3.6) окончательно получим
дифференциальное уравнение
.
Подставляя в (3.6) окончательно получим
дифференциальное уравнение
|
(6.5) |
решением
которого является траектория луча
![]() как функция длины луча (т.н. натуральное
уравнение) при любых заданных распределениях
как функция длины луча (т.н. натуральное
уравнение) при любых заданных распределениях
![]() показателя преломления в пространстве.
Это уравнение используется для расчета
хода луча в системах с неравномерным
распределением показателя преломления,
таких как линзоподобные среды, градиентные
среды, турбулентная атмосфера и т.д. и
т.п. В случае однородной среды
показателя преломления в пространстве.
Это уравнение используется для расчета
хода луча в системах с неравномерным
распределением показателя преломления,
таких как линзоподобные среды, градиентные
среды, турбулентная атмосфера и т.д. и
т.п. В случае однородной среды
![]() ,
решение находится без труда, т.к. в этом
случае
,
решение находится без труда, т.к. в этом
случае
![]() ,
то решение очевидно
,
то решение очевидно
![]() .
(6.6)
.
(6.6)
Получилось
параметрическое уравнение прямой линии
в пространстве, где
![]() и
и
![]() произвольные векторы, которые являются
постоянными интегрирования и могут
быть получены из граничных условий. Их
можно задать, полагая, что луч выходит
из точки
произвольные векторы, которые являются
постоянными интегрирования и могут
быть получены из граничных условий. Их
можно задать, полагая, что луч выходит
из точки
![]() в направлении
в направлении
![]()
![]() ,
(6.7)
,
(6.7)
где
параметр
![]() имеет
смысл длины луча от точки
имеет
смысл длины луча от точки
![]() до
до
![]() ,
т.к.
,
т.к.
![]() .
Приведенные выше рассуждение является
доказательством прямолинейности
распространения света в однородных
средах, а так же дает способ задания
луча в пространстве.
.
Приведенные выше рассуждение является
доказательством прямолинейности
распространения света в однородных
средах, а так же дает способ задания
луча в пространстве.
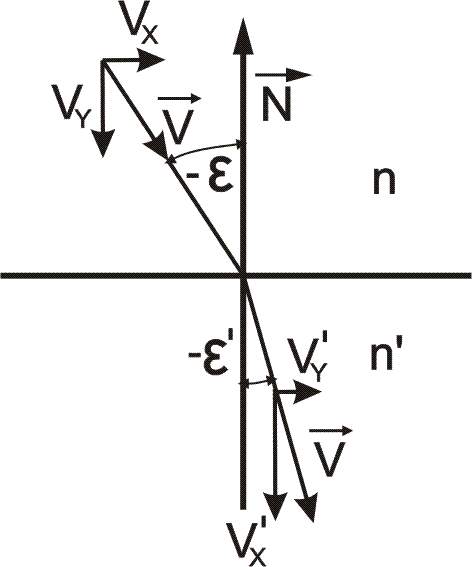
Выведем
закон преломления для произвольно
ориентированной поверхности раздела
двух сред и луча. Направление луча (в
изотропной среде)
определяется
его скоростью
![]() ,
т.е.
,
т.е.
![]() .
Из этого соотношения следует также и
параллельность компононент скоростей
и направляющих векторов в обоих
подпространствах (рис 1).
.
Из этого соотношения следует также и
параллельность компононент скоростей
и направляющих векторов в обоих
подпространствах (рис 1).
|
(6.8) |
Так
как векторы
и
![]() единичные,
то
единичные,
то
|
(6.9) |
Вычислим
выражение
![]() .
В компонентах это будет выглядеть
следующим образом
.
В компонентах это будет выглядеть
следующим образом
|
(6.10) |
 В
силу закона преломления
В
силу закона преломления
![]() компонента
равна нулю, и искомое выражение имеет
только
компонента
равна нулю, и искомое выражение имеет
только
![]() компоненту,
откуда следует, что вектор
коллинеарен
компоненту,
откуда следует, что вектор
коллинеарен
![]() и можно найти такую константу
и можно найти такую константу
![]() ,
что
,
что
![]() .
(6.11)
.
(6.11)
Откуда
![]() ,
(6.12)
,
(6.12)
где
константа
![]() носит название астигматической
постоянной. Ее можно определить из
условия, что
носит название астигматической
постоянной. Ее можно определить из
условия, что
![]() .
Вычисляя квадрат модуля обеих частей
(6.12) и учитывая, что
.
Вычисляя квадрат модуля обеих частей
(6.12) и учитывая, что
![]() ,
получим квадратное уравнение для
,
получим квадратное уравнение для
рис.1
![]() (6.13)
(6.13)
Решая
это уравнения и выбирая знак + перед
радикалом, так как при
![]() направление луча не должно изменяться
и подставляя
в (6.12) получим
направление луча не должно изменяться
и подставляя
в (6.12) получим
 (6.14)
(6.14)
Полученное выражение представляет собой так называемый закон преломления в векторной форме.
Для
отражения можно поступить так же, как
при выводе законов преломления и
отражения, т.е. положив
![]() (5.11-5.12), однако этого недостаточно, так
как необходимо еще учесть преобразование
пространства при зеркальном отражении.
Это осуществится, если у
(5.11-5.12), однако этого недостаточно, так
как необходимо еще учесть преобразование
пространства при зеркальном отражении.
Это осуществится, если у
![]() изменить знак. Таким образом, закон
отражения в векторном виде, т.е. при
произвольных ориентациях луча и
отражающей поверхности будет
изменить знак. Таким образом, закон
отражения в векторном виде, т.е. при
произвольных ориентациях луча и
отражающей поверхности будет
![]() .
(6.15)
.
(6.15)
Формул
(6.7),(6.13) и (6.15) оказывается достаточно
для построения математической модели
геометрической оптики, которая выглядит
следующим образом. В некоторой, общей
системе координат, своими уравнениями
![]() задаются поверхности, где
задаются поверхности, где![]() ,
(
,
(![]() число поверхностей), разделяющие области
пространства,
число поверхностей), разделяющие области
пространства,
заполненные
однородными оптическими средами с
заданными показателями преломлений
![]() (номер
(номер
![]() присваивается подпространству и,
соответственно, показателю преломления,
следующему за поверхностью с номером
по ходу луча). В этой же системе задается
луч своей исходной точкой
(точкой предмета) и направлением
присваивается подпространству и,
соответственно, показателю преломления,
следующему за поверхностью с номером
по ходу луча). В этой же системе задается
луч своей исходной точкой
(точкой предмета) и направлением
![]()
![]() ,
(6.16)
,
(6.16)
где
![]() .
.
В
результате совместного решения уравнения
луча (6.16) и уравнения первой поверхности
![]() находится точка их пересечения
,
так называемая точка встречи. ( Как
правило, после подстановки компонентов
вектора
в уравнение поверхности, сначала находят
параметр
-
длину этого отрезка луча, а затем после
подстановки его в (6.16), определяют и
).
Затем, с помощью (6.13) или (6.15), находят
направление отраженного или преломленного
луча
находится точка их пересечения
,
так называемая точка встречи. ( Как
правило, после подстановки компонентов
вектора
в уравнение поверхности, сначала находят
параметр
-
длину этого отрезка луча, а затем после
подстановки его в (6.16), определяют и
).
Затем, с помощью (6.13) или (6.15), находят
направление отраженного или преломленного
луча
![]() .
.
Рисунок
1
рис.2
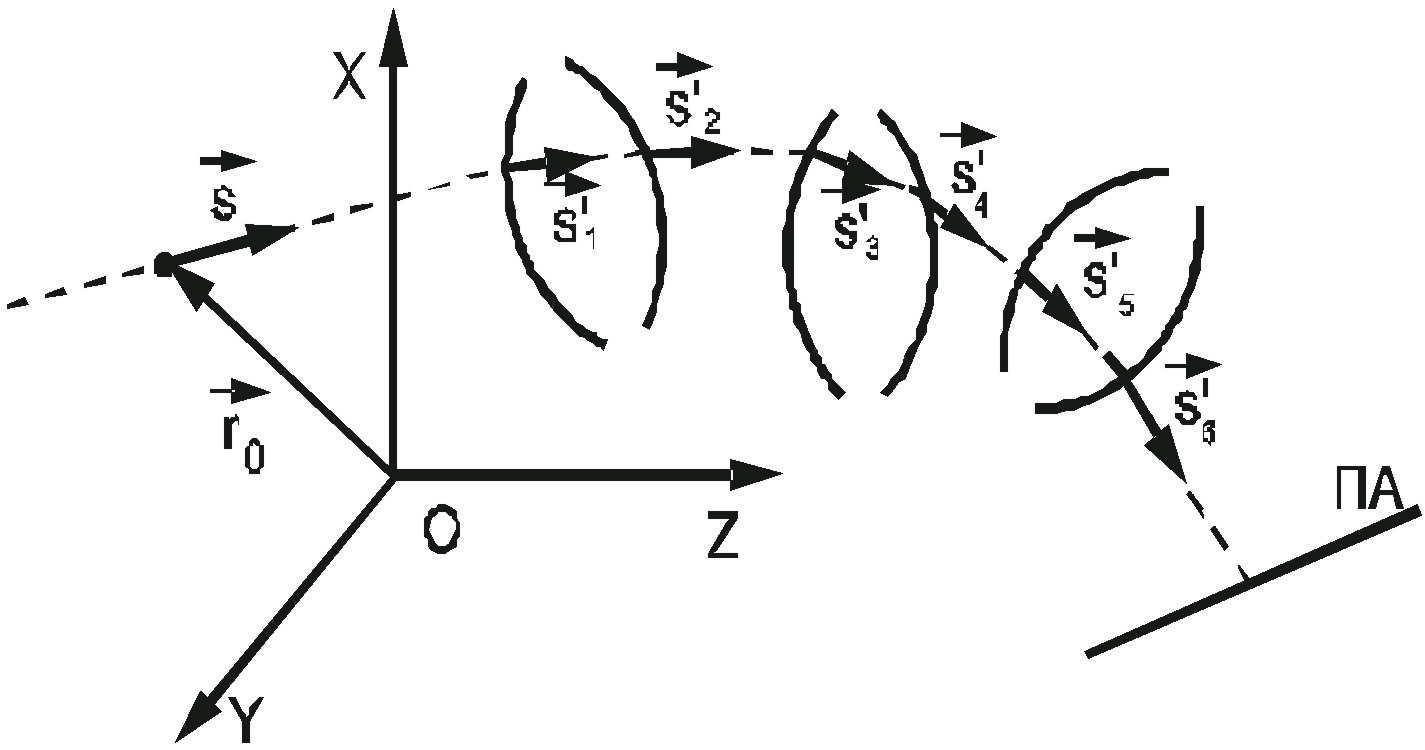
Полагая
найденные точку встречи
и направление
![]() в качестве исходных
в качестве исходных
![]() и
и
![]() повторяем процедуру нахождения точек
встреч и новых направлений преломленного
луча пока не достигнем последней
поверхности оптической системы, после
прохождения которой определим точку
пересечения луча с поверхностью анализа
(ПА) (поверхностью изображения). Затем,
делая такие же вычисления для других
лучей , найдем необходимое число таких
точек пересечений, после чего проводится
интерпретация результата.
повторяем процедуру нахождения точек
встреч и новых направлений преломленного
луча пока не достигнем последней
поверхности оптической системы, после
прохождения которой определим точку
пересечения луча с поверхностью анализа
(ПА) (поверхностью изображения). Затем,
делая такие же вычисления для других
лучей , найдем необходимое число таких
точек пересечений, после чего проводится
интерпретация результата.
Несмотря на относительную простоту модели геометрической оптики, аналитические выражения для компонент луча представляют собой чрезвычайно громоздкие формулы, сложность которых многократно возрастает при увеличении числа поверхностей. Существенные упрощения этих выражений наступает при использовании так называемых систем координат Федера, а также при расчете центрированных оптических систем с поверхностями не выше второй степени (в этом случае система уравнений сводится к квадратному уравнению), однако даже в этих случаях получаемые формулы практически непригодны для “ручного счета” и их используют для составления программ. Получение упрощенных выражений для расчета и анализа оптических систем и использование их является одной из основных задач прикладной оптики.
Однако
имеется случай построения математической
модели в виде аналитических выражений
для реальной оптической системы состоящей
из произвольного числа элементов. Это
система из плоских зеркал, при этом в
выражении (6.15) вектор нормали
постоянен, а направляющий вектор
входит
в выражение линейно его как бы можно
“вынести за скобки”. Благодаря этому
удается разделить факторы, определяющие
сигнал, в нашем случае луч света
(
компонента),
и систему - зеркало (
).
Это “вынесение” можно осуществить,
используя методы и символику
векторно-матричной алгебры, в которой
обычный вектор представляется в виде
матрицы, состоящей из одного столбца и
![]() строк (в нашем случае
строк (в нашем случае
![]() ).
В такой записи выражение (6.15) примет вид
).
В такой записи выражение (6.15) примет вид
 .
(6.17)
.
(6.17)
Второе слагаемое (без коэффициента 2) можно преобразовать, изменив порядок сомножителей, согласно правилу умножения матриц (сделав циклическую перестановку).
![]() ,
(6.18)
,
(6.18)
где
-
![]() -матрицы - столбцы, соответствующие
векторам
-матрицы - столбцы, соответствующие
векторам
![]() -
соответственно; индекс Т
- означает транспонирование (в нашем
случае эта операция переводит вектор
- строку в вектор - столбец и наоборот).
Результат умножения столбца на строку
представляет собой квадратную матрицу,
которая в нашем случае имеет вид
-
соответственно; индекс Т
- означает транспонирование (в нашем
случае эта операция переводит вектор
- строку в вектор - столбец и наоборот).
Результат умножения столбца на строку
представляет собой квадратную матрицу,
которая в нашем случае имеет вид
 .
(6.19)
.
(6.19)
В такой форме, выражения (6.15) или (6.17) можно записать как
![]()
![]()
![]() ,
(6.20)
,
(6.20)
где - т.н. матрица отражений. Как следует из (6.14), выражение для нее имеет вид
![]() .
(6.21)
.
(6.21)
Если
система состоит из
![]() плоских зеркал и каждое имеет свою
матрицу отражений
плоских зеркал и каждое имеет свою
матрицу отражений
![]() ,
то всю систему можно представить в виде
(6.21), где в качестве матрицы отражений
будет матрица всей системы, которая
получится как произведение матриц всех
зеркал. Такое представление имеет
большие преимущества при проектировании,
анализе и оптимизации зеркальных систем.
,
то всю систему можно представить в виде
(6.21), где в качестве матрицы отражений
будет матрица всей системы, которая
получится как произведение матриц всех
зеркал. Такое представление имеет
большие преимущества при проектировании,
анализе и оптимизации зеркальных систем.