

Лекція 10
Лінійність або нелінійність стосовно вхідних сигналів — це не та ж саме, що лінійність або нелінійність вихідних змінних (функцій) по параметрах. Оператор і модель, що задає їм, називаються лінійними, якщо для системи справедлив принцип суперпозиції. Він полягає в тому, що лінійної комбінації довільних вхідних сигналів ставиться у відповідність та я лінійна комбінація сигналів на виході із системи:
![]()
Математичну
модель із використанням лінійного
оператор можна записати у вигляді
![]() .
.
Нелінійні рівняння, у свою чергу, можна розділити на два підкласи: алгебраїчні (у які над змінними робите тільки дії додавання, вирахування, множення, ділення й піднесення в ступінь із раціональним показником) і трансцендентні, у які входять інші функції від змінних (показові, тригонометричні та ін.). У кожному разі складність моделі істотно залежить від числа рівнянь і від виду вхідних у них функцій. Звичайно найбільше просто вирішуються алгебраїчні рівняння 1-й ступеня (лінійні), найбільше складно - трансцендентні.
Лінійні й нелінійні моделі. Лінійність або нелінійність аналізованого процесу впливає на вид моделі, метод програмування й швидкодія програми при її на практиці кількість продуктів і рівнянь, по яких ведеться розрахунок, становить кілька сотень, тому рішення таких задач вручну одержати досить важко.
У моделях виробничих процесів, крім рівнянь, можуть бути й нерівності.
У математичних моделях часто використається ряд нелінійних математичних структур, у першу чергу, це статечні поліноми. Методи інтерполяції дають можливість істотно спростити способи розрахунку коефіцієнтів статечного полінома при наявності точних даних про вхідні й вихідні параметри. Наприклад, при виборі як математична структура полінома виду

для даних з рівновіддаленими значеннями незалежної змінної коефіцієнти розраховуються по спрощеному способі:
![]() ,
,
де
![]() —
крок інтерполяції;
—
крок інтерполяції;![]() — різниця
-го
порядку. У результаті поліном
— різниця
-го
порядку. У результаті поліном
![]() записується у вигляді
записується у вигляді
![]()
називається інтерполяційним поліномом Ньютона.
В інтерполяційному поліномі Ньютона використаються раз отримані при русі по одну сторону від значення, узятого якості початкового. При використанні центральних разностей, отриманих у результаті застосування як наступних значень функцій (що випливають після значення, обраного в як початкового), так і попередніх, коефіцієнти полінома розраховуються в такий спосіб:

Увівши
позначення
![]() ,
одержимо інтерполяційний поліном Гауса
для рівновіддалених
,
одержимо інтерполяційний поліном Гауса
для рівновіддалених
![]() крапок інтерполяції:
крапок інтерполяції:

Для нерівновіддалених вузлів інтерполяції використається інтерполяційний поліном Лагранжа

Особливе місце серед відомих математичних структур займають ортогональні поліноми. Ортогональним називається поліном
![]()
якщо
всяка функція
![]() системи
системи
![]() норма й дві різні функції
й
зазначена система функцій ортогональні
в заданому інтервалі
норма й дві різні функції
й
зазначена система функцій ортогональні
в заданому інтервалі
![]() ,
тобто має місце рівність
,
тобто має місце рівність

Подібний
вибір функцій
дає можливість при квадратичному
наближенні зробити спрощений розрахунок
коефіцієнтів
![]() .
.
Найбільше часто використають ті ортогональні поліноми, для яких легко знайти вираження в явному виді. Такими є, наприклад, наведені нижче поліноми Чебишева, використовувані для проміжку [-1; +1]. Полином Чебишева першого роду визначається вираженням
![]()
де
значення
![]() визначаються по вираженню
визначаються по вираженню
![]()
Для
цілих позитивних значень
це вираження є звичайним статечним
поліномом, тому що
![]()
При
зміні
![]() та у проміжку
та у проміжку
![]() використається
поліном Эрміта
використається
поліном Эрміта
![]()
Для періодичних функцій використаються тригонометричні поліноми
![]()
Кожна з математичних структур має свою специфіку, що та визначає область її застосування при моделюванні. Інтерполяційні поліноми використаються для об'єктів з відомими залежностями або з точними даними про значення вхідних і вихідних параметрів.
Моделі розподілені й зосереджені в просторі. Технологічний процес може бути розподіленим або зосередженим у просторі й одночасно змінюватися в часі. Моделі, що описують розподілені процеси, називаються моделями з розподіленими параметрами. Звичайно вони мають вигляд диференціальних рівнянь у частинних похідних. Якщо основні змінні процесу не змінюються в просторі, а тільки в часі, то математичні моделі, що описують такі процеси, називають моделями із зосередженими параметрами й представляють їх у вигляді звичайних диференціальних рівнянь.
Якщо
процес розвивається одночасно й у часі,
і в просторі (по одній координаті
![]() то оператор
може перетворювати вхідну векторну
функцію
то оператор
може перетворювати вхідну векторну
функцію
![]() у вихідну векторну функцію
у вихідну векторну функцію
![]() й залежати від обох аргументів:
й залежати від обох аргументів:
![]() .
.
Моделі
безперервні й дискретні в часі.
Безперервної в часі модель є в тому
випадку, що коли характеризує її змінна
визначена для будь-якого значення часу
конкретної в часі, — якщо змінна
отриманий; до у певні моменти часу.
Безперервний у часі процес визначається
моделлю
![]() ,
де
може
приймати будь-яке значення.
,
де
може
приймати будь-яке значення.
Так,
якщо сигнал
![]() деякого компонента системи обгинає
тільки в моменти часу
деякого компонента системи обгинає
тільки в моменти часу
![]() те
такий дискретний сигнал у моделюванні
записують у вигляді послідовності
те
такий дискретний сигнал у моделюванні
записують у вигляді послідовності
![]() .
Дискретність моделі може також виникнути
в тому випадку, її складається з
безперервних компонентів, але інформація
переходи однієї компоненти до іншої
за заданою схемою (такі переходи можливі
тільки по закінченні відповідних
операцій).
.
Дискретність моделі може також виникнути
в тому випадку, її складається з
безперервних компонентів, але інформація
переходи однієї компоненти до іншої
за заданою схемою (такі переходи можливі
тільки по закінченні відповідних
операцій).
Безперервні моделі застосовуються при вивченні систем, з безперервними процесами, які описуються за допомогою систем диференціальних рівнянь, що задають швидкість зміни змінні системи в часі. Безперервні моделі можна описати за допомогою кінцево-різницевих рівнянь, які в межу ходять у відповідні диференціальні рівняння. Програмування безперервних моделей зводиться до дискретної обчислювальної задачі, яку можна символічно записати рівняння
![]()
де
![]() ,
,
![]() — відповідно вектори стану з компонентами,
обумовленими в усі попередні моменти
в;
— вектор зовні системних змінних;
—
вектор параметри системи;
— відповідно вектори стану з компонентами,
обумовленими в усі попередні моменти
в;
— вектор зовні системних змінних;
—
вектор параметри системи;
![]() — функція, що визначає поводження
системи.
— функція, що визначає поводження
системи.
Кінцево-різницеві рівняння (лінійного й нелінійного, стаціонарного й нестаціонарні, рівняння першого й більше високого порядків, одномірні й багатомірні) дозволяють описати самі образні динамічні системи як з дискретним часом, у межі, з безперервним, тобто це досить універсально моделювання.
Розглянемо
лінійне одномірне кінцеворазностні
рівняння 7-го порядку
![]() з постійними коефіцієнтами. Припустимо
спостереження виробляються в дискретні,
рівновіддалені моменти часу. Приймемо
також, що реакція на виході такої
динамічної стаціонарної системи
з'являється з деякою тимчасовою затримкою
(на
з постійними коефіцієнтами. Припустимо
спостереження виробляються в дискретні,
рівновіддалені моменти часу. Приймемо
також, що реакція на виході такої
динамічної стаціонарної системи
з'являється з деякою тимчасовою затримкою
(на
![]() інтервалів квантування) стосовно
вхідного сигналу. З урахуванням
зазначених припущень запишемо
кінцево-різницеве рівняння у вигляді
інтервалів квантування) стосовно
вхідного сигналу. З урахуванням
зазначених припущень запишемо
кінцево-різницеве рівняння у вигляді

де
![]() — параметри рівняння;
— параметри рівняння;
![]() — номер чергового інтервалу квантування.
— номер чергового інтервалу квантування.
Лінійне кінцево-різницеве рівняння високого порядку подібного типу завжди можна замінити системою кінцево-різницевих рівнянь першого порядку, виражених у формі Коші, тобто дозволених щодо перших разностей. Ця обставина привела до того, що як найбільше загальний вид подання математичного опису стали широко використатися кінцево-різницеві моделі у формі Коші. Стаціонарна лінійна система може бути описана моделлю в стандартній формі:
де
![]() ,
,
![]() ,
,
![]() — відповідно вектори відгуків, змінні
стани й керуючих вхідних сигналів.
— відповідно вектори відгуків, змінні
стани й керуючих вхідних сигналів.
Матриці
![]() ,
,
![]() і
і
![]() не залежать від моменту часу, тобто є
постійними. Вони можуть включати
невідомі параметри моделі, що підлягають
оцінюванню. Наведену модель називають
також канонічною формою моделі
стаціонарної лінійної системи з
дискретним часом. Якщо система
нестаціонарна, то матриці
,
і
будуть залежати від
.
не залежать від моменту часу, тобто є
постійними. Вони можуть включати
невідомі параметри моделі, що підлягають
оцінюванню. Наведену модель називають
також канонічною формою моделі
стаціонарної лінійної системи з
дискретним часом. Якщо система
нестаціонарна, то матриці
,
і
будуть залежати від
.
Нелінійна імпульсна система в досить загальному випадку може бути описана моделлю

де
![]() — векторні функції.
— векторні функції.
Дискретизація
можлива не тільки по аргументі — часу,
але й за рівнем (величині) сигналів. У
цьому випадку сигнали мають кінцеве
число значень у деякій заданій області
існування. Подібні сигнали називають
дискретними по величині або квантованими.
І якщо безперервному скалярному сигналу
![]() відповідає плавна крива, те квантованому
скалярному сигналу
відповідає кусочно-постійна лінія
(рис).
відповідає плавна крива, те квантованому
скалярному сигналу
відповідає кусочно-постійна лінія
(рис).
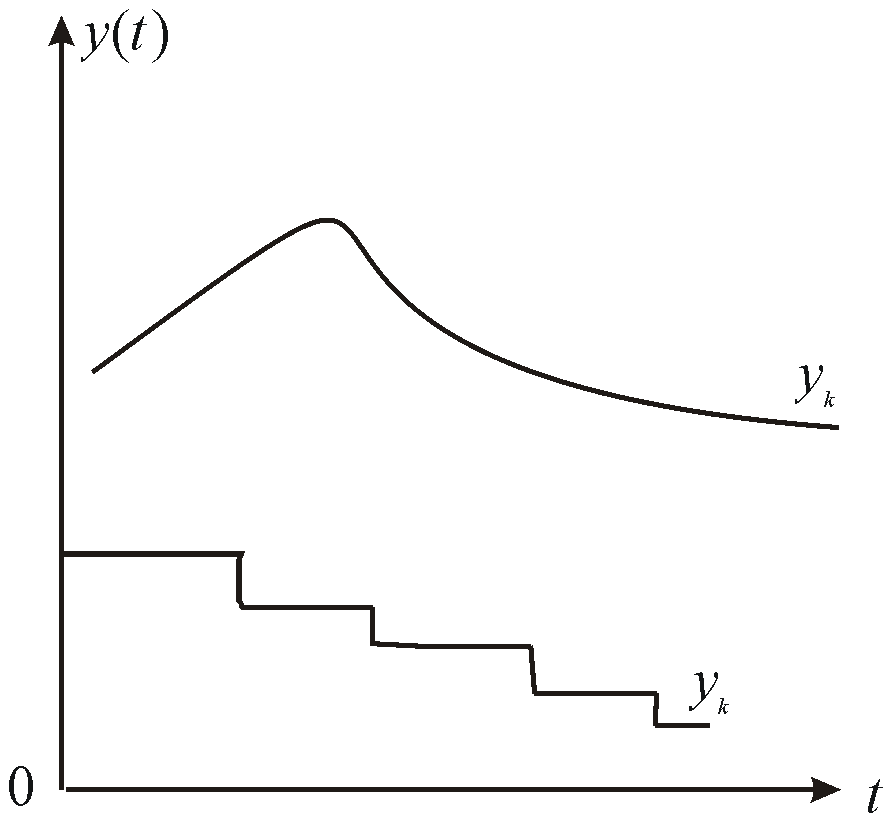
Рис.
Безперервний
![]() і дискретний по величині
сигнали
і дискретний по величині
сигнали
Системи (моделі), у яких вхідні й вихідні сигнали є безперервними за часом і по величині, називають безперервними. Якщо ж вхідні й вихідні сигнали дискретні за часом, то системи називають системами з дискретним часом або імпульсними. Системи, у яких вхідні й вихідні сигнали дискретні або за часом, або по величині, називають дискретними.
Існують також і системи проміжного типу, у яких властивості сигналів як функцій від часу різні. Наприклад, частина сигналів може бути безперервної в часі, тоді як інші сигнали можуть бути дискретними. Така система називається дискретно-безперервної за часом.