

Механизм шарнирного четырёхзвенника
Этот механизм образуется с использованием только низших вращательных кинематических пар. Выходное звено ВК в таком механизме может качаться или вращаться (в зависимости от выбранных размеров звеньев). В первом случае (рис.15) выходное звено 3 называется коромыслом. Во втором случае (рис.16) выходное звено также кривошип, а механизм называется двухкривошипным.
1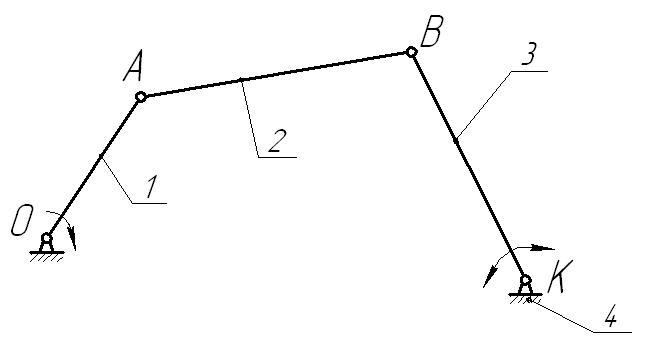 -кривошип
-кривошип
2-шатун
3-коромысло
4-стойка
Рис. 15
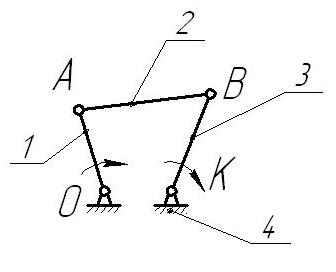
1-кривошип
2-шатун
3-кривошип
4-стойка
Рис.16
Кулачковые механизмы
На рис.17 представлены наиболее часто применяемые схемы плоских кулачковых механизмов. Входным (ведущим) звеном является вращающийся кулачок 1. Ведомое звено называется толкателем 3. Для уменьшения потерь на трение в конструкциях кулачковых механизмов часто предусматривают ролик 2, образующий вращательную пару с толкателем.
В названии кулачкового механизма указывается вид движения толкателя и вид его рабочей поверхности.
На рис.17, а представлена схема кулачкового механизма с поступательным роликовым толкателем. В этом механизме ось вращения кулачка и линия перемещения центра ролика в общем случае смещены относительно друг друга. Расстояние е между ними называется эксцентриситетом. В частном случае, когда е = 0, механизм называют центральным кулачковым механизмом с поступательным роликовым толкателем.
Механизм на рис.17, б называется кулачковым механизмом с качающимся роликовым толкателем.
На рисунках 17, в и 17, г представлены механизмы с плоским толкателем: кулачковый механизм с поступательным плоским толкателем и механизм с качающимся плоским толкателем.
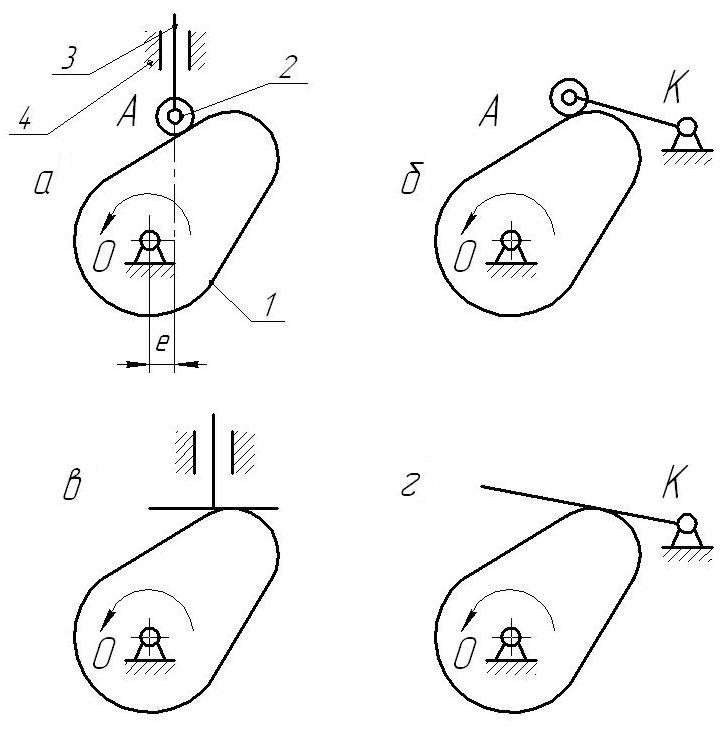
Рис.17
 ФРИКЦИОННЫЕ
МЕХАНИЗМЫ
ФРИКЦИОННЫЕ
МЕХАНИЗМЫ
В этих механизмах движение от входного звена к выходному передаётся за счёт сил трения, возникающих в результате контакта этих звеньев.
Простейшая фрикционная передача показана на рис.18. Она состоит из двух цилиндрических катков и стойки. Один каток прижимается к другому силой упругости пружины.
Рис.18
Зубчатые механизмы
В технике различают трёхзвенные зубчатые передачи, многоступенчатые передачи и планетарные передачи. Трёхзвенная передача состоит из двух зубчатых колёс и стойки.
Передача, в которой угловая скорость ведомого звена меньше, чем угловая скорость ведущего звена, называется понижающей передачей (редуктор). Если в зубчатой передаче происходит увеличение угловой скорости ведомого звена, передача называется повышающей (мультипликатор).
На рис.19 приводятся условные изображения трёхзвенной цилиндрической зубчатой передачи внешнего зацепления (рис.19, а), цилиндрической передачи внутреннего зацепления (рис.19, б) и реечной зубчатой передачи.
На условных изображениях плоских и пространственных зубчатых пар колёса на виде с торца изображают штрихпунктирными линиями. Зубья изображают только на зубчатой рейке. На виде сбоку зубчатые колёса изображают сплошными линиями.

Рис.19
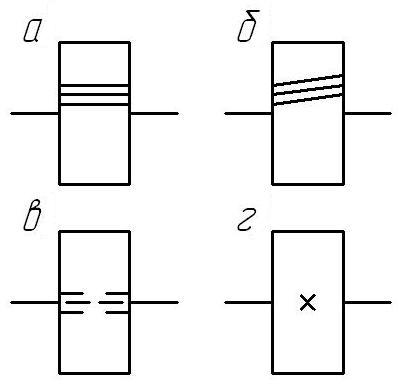
В некоторых случаях на кинематической схеме требуется различать прямозубые и косозубые колёса. Соответствующие условные обозначения представлены на рис.20, а и 20, б.
Для различения колёс, вращающихся на оси и закреплённых на валу, применяют условные обозначения колёс по рис.20, в и 20, г.
Рис. 20
На рис.21 показано в двух проекциях условное изображение конической зубчатой передачи, которая передаёт вращение между пересекающимися осями.

Рис.21
На рис.22 приводятся условные изображения червячной передачи с цилиндрическим червяком (рис.22, а) и винтовой зубчатой передачи (рис.22,б).

Рис.22
Оси колёс в этих передачах перекрещиваются. Червячная передача применяется для передачи вращения от червяка к червячному колесу в качестве понижающей передачи. При зацеплении зубья червяка и колеса находятся в линейном контакте. Винтовая зубчатая передача состоит из двух косозубых (винтовых) колёс. Ввиду того, что зубья в винтовой передаче касаются в точке, её нагрузочная способность ниже, чем нагрузочная способность червячной передачи.
На кинематических схемах червячных и винтовых передач должно быть задано направление винтовой линии червяка в червячной передаче и направление винтовой линии одного из зубчатых колёс винтовой зубчатой передачи. Различают правые и левые винтовые линии.
Для определения направления винтовой линии следует мысленно перемещаться по образующей цилиндрической заготовке червяка или косозубого колеса, начиная движение от любого из двух его торцов, до встречи с винтовой линией и, рассматривая винтовую линию как препятствие, продолжать движение по винтовой линии. Если при этом потребуется повернуть направо, винтовая линия называется правой, при повороте налево-левой винтовой линией. На кинематических схемах по рис.22 червяк и косозубое колесо винтовой передачи представляют собой соответственно правый червяк и левое косозубое колесо.
На рис.23 представлены условные изображения двух наиболее часто применяемых планетарных механизмов: плоской планетарной передачи (рис.23, а) и конической планетарной передачи (рис.23, б). Планетарными называются механизмы, которые имеют зубчатые колёса, оси которых вращаются в пространстве. Планетарные механизмы с одной степенью свободы (с одним двигателем) называются планетарными передачами.
Зубчатые колеса а и в планетарных передач называются центральными. Колесо в в рассматриваемых схемах представляет собой неподвижное колесо. Колесо с с подвижной осью вращения называется планетарным (сателлит). Звено h называется водило.
В планетарных механизмах, представленных на рис.23, передача движения возможна от колеса а к водилу h и наоборот.
В первом случае планетарная передача является понижающей, во втором-- повышающей передачей.

Рис.23
ВИНТОВЫЕ МЕХАНИЗМЫ
Простейший винтовой механизм (рис.24) состоит из винта 1, гайки 2 и стойки 3. Гайка является одновременно ползуном, который перемещается поступательно в неподвижных направляющих. Этот механизм называют также передачей ''винт-гайка''.
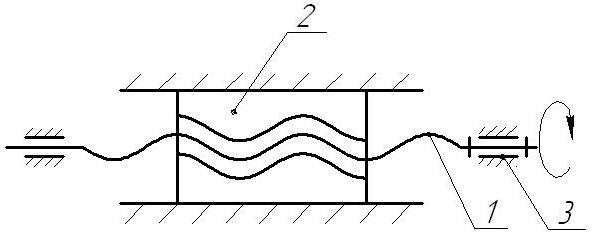
Рис.24