

Министерство образования и науки Российской Федерации Федеральное агентство по образованию
Санкт-Петербургский институт машиностроения (ВТУЗ-ЛМЗ)
Кафедра теории механизмов и деталей машин
СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ МЕХАНИЗМОВ.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
Методические указания
к выполнению лабораторных работ
Санкт-Петербург 2009
Составление кинематических схем механизмов. Структурный анализ механизмов: Метод. указания к выполнению лабораторных работ для студентов всех специальностей.
Изложены общие теоретические сведения для самостоятельной проработки соответствующих разделов курса ''Теория механизмов и машин''. Указан порядок выполнения работы и содержание отчёта, приведены контрольные задания и вопросы.
Составители: к.т.н., доц. В.А. Трубняков
ст. преп. Н.В. Дубошина
Рецензент: к.т.н., доц. А.А.Янсон
Методические указания утверждены на заседании кафедры
Редактор: Г.Л. Чубарова
П21(03)
__________________________________________________________________
Подписано в печать 24.03.2009 Формат 60х90 1/16
Бумага тип. №3 Печать офсетная Усл. печ. л. 1,75
Уч.-изд. л. 1,75 Тираж 120 экз. Заказ 8
Издание Санкт-Петербургского института машиностроения
195197, Санкт-Петербург, Полюстровский пр. 14
__________________________________________________________________
ОП ПИМаш
Лабораторная работа №1
СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ МЕХАНИЗМОВ
Цель работы – развитие навыка в составлении и чтении кинематических схем, ознакомление с различными типами механизмов.
ОБЩИЕ СВЕДЕНИЯ
Механизм - это система подвижно связанных между собой материальных тел, предназначенная для преобразования движения и преодоления сил с помощью двигателя.
Механизм состоит из звеньев. Звено - это одна или несколько деталей, движущихся как одно целое. Деталь - это изделие, изготовленное без сборочных операций.
Два звена, подвижно связанных между собой, образуют кинематическую пару.
ВИДЫ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ КИНЕМАТИЧЕСКИХ ПАР
По виду относительного движения звеньев кинематические пары делятся на плоские и пространственные.
По характеру контакта звеньев кинематические пары делятся на высшие и низшие. В высшей кинематической паре контакт звеньев происходит по линии или в точке. Одно звено относительно другого имеет возможность перекатываться и скользить. В низшей кинематической паре звенья касаются по поверхности (плоскость, цилиндрическая поверхность, сфера, винтовая поверхность).
В относительном движении звеньев при этом возможно лишь скольжение.
Кинематические пары классифицируют по числу Н степеней свободы в относительном движении (число независимых подвижностей) или по числу S условий связи (ограничений), накладываемой парой на движение одного звена относительно другого. Так как для свободного тела в пространстве число степеней свободы равно шести, то величины Н и S связаны соотношением Н = 6 - S, где S = 1,2,3,4,5. При S = 0 пары не существует, а имеются два независимых тела. При S = 6 пара становится жёстким соединением деталей, т.е. одним звеном.
Ниже даны примеры наиболее распространённых кинематических пар, варианты их условных изображений на схемах.
Одноподвижные кинематические пары (Н = 1)
а) плоская, низшая, вращательная пара (плоский шарнир)
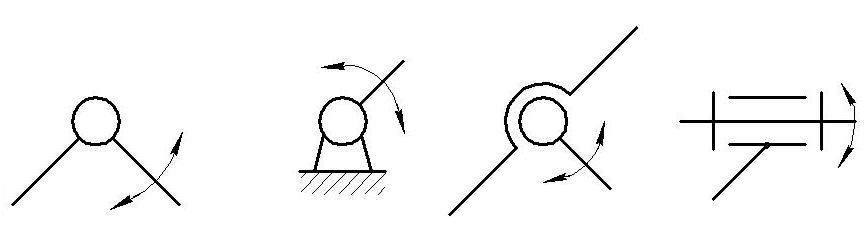
Рис.1
б) плоская, низшая, поступательная пара
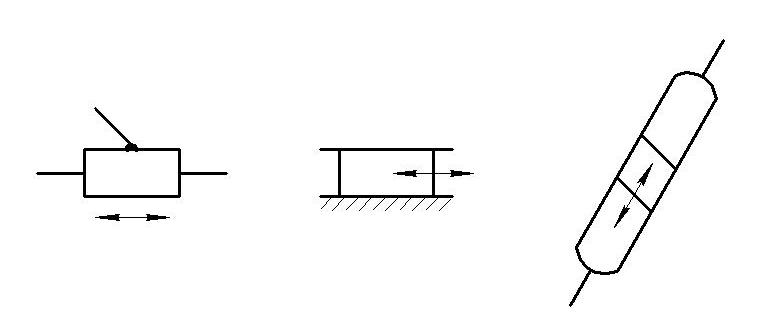
Рис.2
в) пространственная, низшая винтовая кинематическая пара

В данной паре (винт-гайка) вращательное и поступательное движения одного из звеньев связаны между собой.
Рис.3
Двухподвижные кинематические пары (Н = 2)
а) плоская высшая кулачковая
кинематическая пара
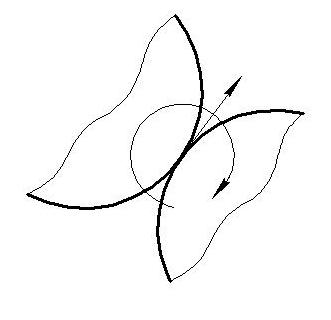
Рис.4
б) пространственная низшая кинематическая пара –цилиндрический шарнир

Рис.5
Трёхподвижные кинематические пары (Н = 3)
а) пространственная низшая кинематическая пара - сферический
ш арнир
арнир
Данная пара допускает три независимых вращательных движения вокруг осей x , y, z.
Рис.6
б) пространственная высшая кинематическая пара (образуется при касании по линии двух цилиндрических поверхностей)

Рис.7
Пространственная высшая четырёхподвижная кинематическая пара ( Н=4)
Данная пара образуется при касании по линии цилиндрической поверхности и плоскости.
ческая
пара (

Рис.8
Пространственная высшая пятиподвижная кинематическая пара (Н = 5)
Данная кинематическая пара образуется при точечном контакте двух сфер или сферы и плоскости.
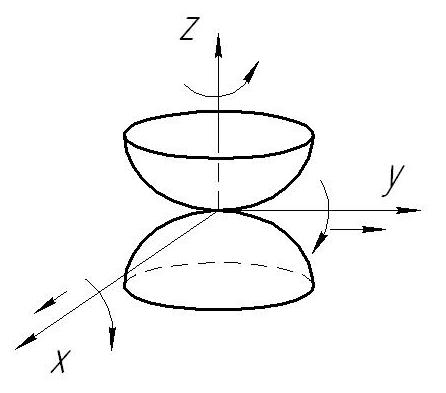
Рис.9